
Computer Hardware User Manual










Chapter 40 Linear and Arc Interpolation Motion Control API | PCI-DMC-A01 / PCI-DMC-B01
Revised March, 2012 40-7
Description
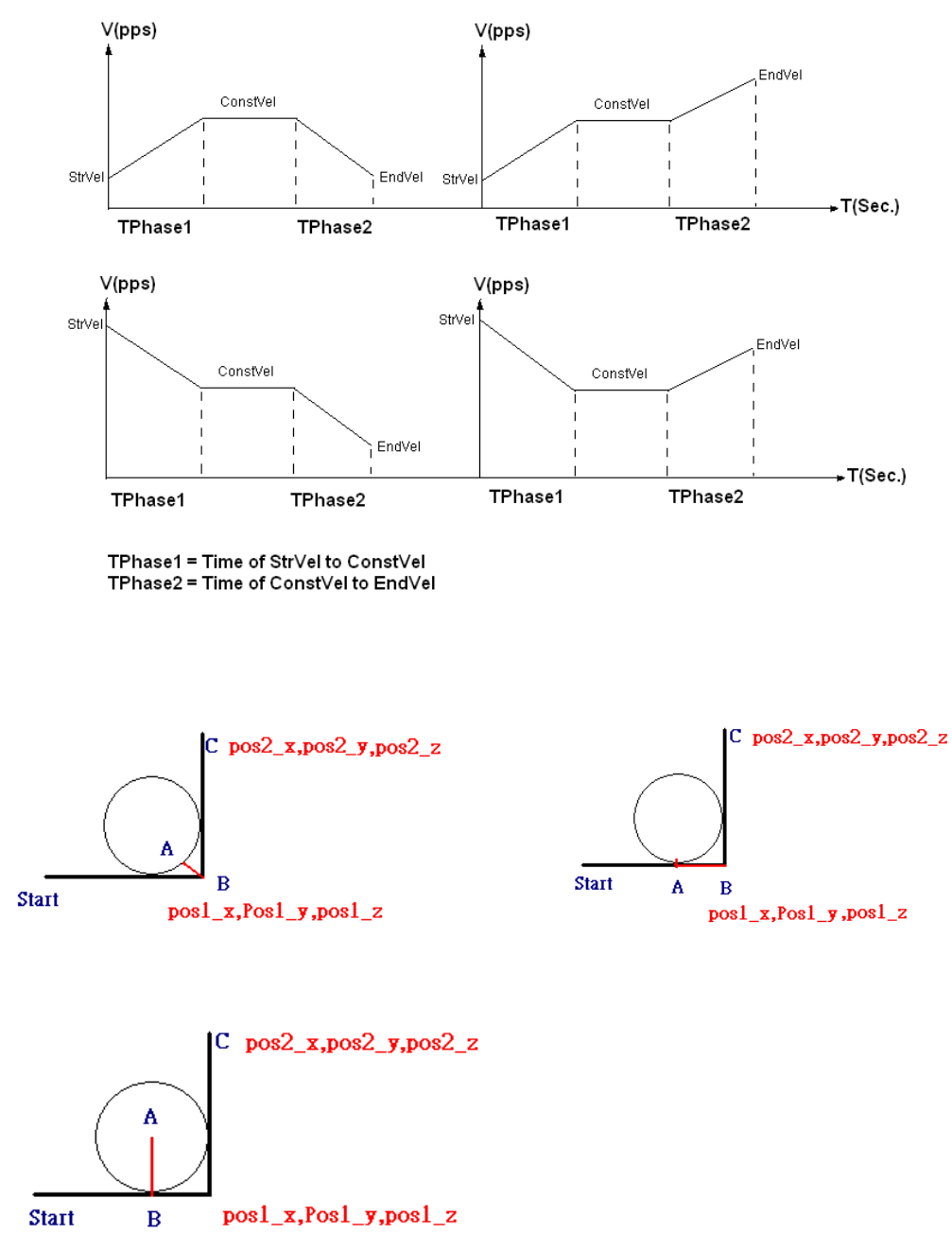
Figure 40.7 Explanation of TPhase1 and TPhase2
Mode Parameter Settings
Figure 40.8 Mode = 0 Perpendicular
distance from arc to right angle (AB)
Figure 40.9 Mode = 1 Perpendicular distance
from start of arc to right angle (AB)
Figure 40.10 Mode = 2 Arc radius (AB)