
User's Manual










Table Of Contents
- 16-Axis MACRO Slave Station Binding to a MACRO Master
- Mapping Servo Channels to Servo Node
- Mapping Motor Node Registers
- Mapping Motor Function Registers to Node Registers
- Mapping of General Purpose I/O
- UMAC (Pack) Configuration
- I/O Accessory Boards
- Auto Configuration and Identification of UMAC (Pack) Boards
- UMAC (Pack) Interface/Breakout Boards
- MACRO Ring Rules
- I7: Phase Cycle Extension
- I19: Clock Source I-Variable Number
- Turbo PMAC2 Ultralite: I6800 and I6801
- UMAC Turbo
- Notes on Servo Clock
- I6840: MACRO IC 0 Master Configuration
- I6890/I6940/I6990: MACRO IC 1/2/3 Master Configuration
- I6841/I6891/I6941/I6991: MACRO IC 0/1/2/3 Node Activation Control
- I70/I72/I74/I76: MACRO IC 0/1/2/3 Node Auxiliary Function Enable
- I71/I73/I75/I77: MACRO IC 0/1/2/3 Node Protocol Type Control
- I78: MACRO Master/Slave Auxiliary Communications Timeout
- I79: MACRO Master/Master Auxiliary Communications Timeout
- I80, I81, I82: MACRO Ring Check Period and Limits
- Ixx01: Commutation Enable
- Ixx02: Command Output Address
- Ixx03, Ixx04: Feedback Address
- Ixx10, Ixx95: Absolute Position Address and Format
- Ixx25, Ixx24: Flag Address and Mode
- Ixx70, Ixx71: Commutation Cycle Size
- Ixx75: Absolute Phase Position Offset
- Ixx81, Ixx91: Power-On Phase Position Address and Mode
- Ixx82: Current Loop Feedback Address
- Ixx83: Commutation Feedback Address
- Ring Update Frequency
- Station Servo Clock Frequency
- MACRO IC 0
- MACRO IC 1
- MACRO IC 0
- MACRO IC 1
- Channels 1-4 (First 4-Axis Board)
- Channels 5-8 (Second 4-Axis Board)
- On Board Auxiliary Channels (Handwheel/Pulse and Direction)
- Incremental Digital Encoder Feedback
- Analog Encoder Feedback
- Resolver Feedback
- MLDT Feedback
- 12-Bit A/D Converter Feedback
- 14E Parallel Feedback
- MI17 Amplifier Fault Disable Control
- MI18 Amplifier Fault Polarity Control
- MI10x Position Feedback Address
- MI11x Power-On Position Feedback Address
- MI16x Power-On MLDT Excitation Value
- MI975 I/O Node Enable
- MI19 I/O Transfer Period
- Bi-Directional I/O Transfer Control
- Uni-Directional I/O Transfer Control
- Setting the Trigger Condition
- Using for Homing
- Using in User Program
- Setting up for a Single Pulse Output
- Setting up for Multiple Pulse Outputs
- How to Enable and Disable MACRO ASCII Communication Mode
- The Ring Order Method
- Example: Read Using MM-Variables – Actual Encoder
- Example: Read DAC Output from Servo IC Card
- Example: Monitor Up/Down Counter from Servo IC Card
- Example: Write to DACnB on Servo IC Card
- Example: Read Using MI198 and MI199 – Direct Hal
- Example: Read Using MI198 and MI199 – Actual DAC
16-Axis MACRO CPU User Manual
20 Turbo PMAC2 Software Setup for MACRO Station
The default conversion table in the Turbo PMAC2 Ultralite controller processes the position feedback
registers of the eight servo nodes of MACRO IC 0. This yields the values in the following table:
Turbo PMAC2 Ultralite Defaults
I-Variable Setting Meaning I-Variable Setting Meaning
I8000 $2F8420 MACRO Node 0 Reg 0 Read I8008 $2F8430 MACRO Node 8 Reg 0 Read
I8001 $018000 24 bits, bit 0 LSB I8009 $018000 24 bits, bit 0 LSB
I8002 $2F8424 MACRO Node 1 Reg 0 Read I8010 $2F8434 MACRO Node 9 Reg 0 Read
I8003 $018000 24 bits, bit 0 LSB I8011 $018000 24 bits, bit 0 LSB
I8004 $2F8428 MACRO Node 4 Reg 0 Read I8012 $2F8438 MACRO Node 12 Reg 0 Read
I8005 $018000 24 bits, bit 0 LSB I8013 $018000 24 bits, bit 0 LSB
I8006 $2F842C MACRO Node 5 Reg 0 Read I8014 $2F843C MACRO Node 13 Reg 0 Read
I8007 $018000 24 bits, bit 0 LSB I8015 $018000 24 bits, bit 0 LSB
I8016 - I8191 = 0
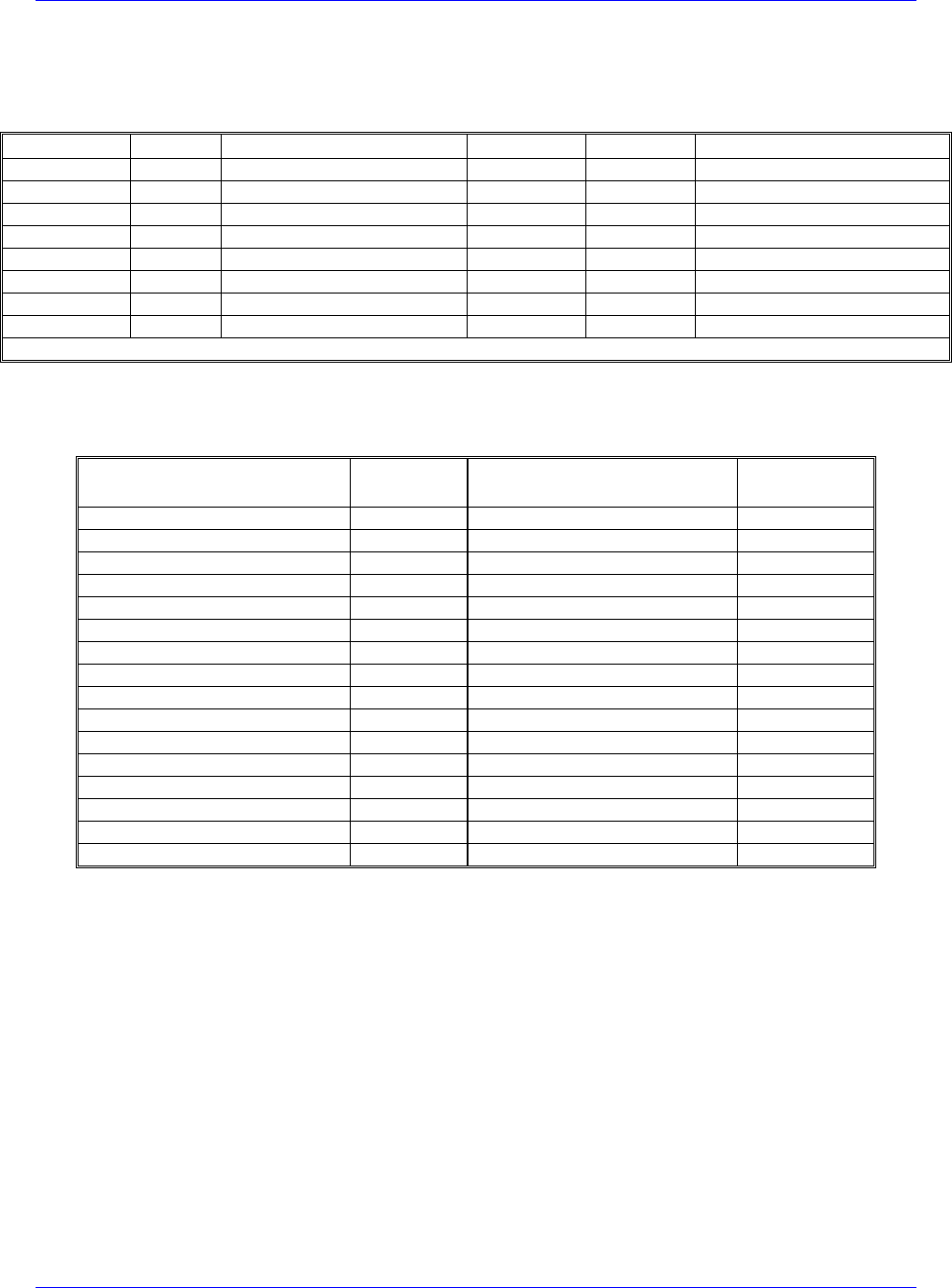
The following table contains the entry first line for each servo node Register 0 for all MACRO ICs (with
the addresses specified by I20 – I23 at their default values). Remember that the second line of the entry
should always be $018000.
Register First Line
Value
Register First Line
Value
MACRO IC 0 Node 0 Reg. 0 $2F8420 MACRO IC 2 Node 0 Reg. 0 $2FA420
MACRO IC 0 Node 1 Reg. 0 $2F8424 MACRO IC 2 Node 1 Reg. 0 $2FA424
MACRO IC 0 Node 4 Reg. 0 $2F8428 MACRO IC 2 Node 4 Reg. 0 $2FA428
MACRO IC 0 Node 5 Reg. 0 $2F842C MACRO IC 2 Node 5 Reg. 0 $2FA42C
MACRO IC 0 Node 8 Reg. 0 $2F8430 MACRO IC 2 Node 8 Reg. 0 $2FA430
MACRO IC 0 Node 9 Reg. 0 $2F8434 MACRO IC 2 Node 9 Reg. 0 $2FA434
MACRO IC 0 Node 12 Reg. 0 $2F8438 MACRO IC 2 Node 12 Reg. 0 $2FA438
MACRO IC 0 Node 13 Reg. 0 $2F843C MACRO IC 2 Node 13 Reg. 0 $2FA43C
MACRO IC 1 Node 0 Reg. 0 $2F9420 MACRO IC 3 Node 0 Reg. 0 $2FB420
MACRO IC 1 Node 1 Reg. 0 $2F9424 MACRO IC 3 Node 1 Reg. 0 $2FB424
MACRO IC 1 Node 4 Reg. 0 $2F9428 MACRO IC 3 Node 4 Reg. 0 $2FB428
MACRO IC 1 Node 5 Reg. 0 $2F942C MACRO IC 3 Node 5 Reg. 0 $2FB42C
MACRO IC 1 Node 8 Reg. 0 $2F9430 MACRO IC 3 Node 8 Reg. 0 $2FB430
MACRO IC 1 Node 9 Reg. 0 $2F9434 MACRO IC 3 Node 9 Reg. 0 $2FB434
MACRO IC 1 Node 12 Reg. 0 $2F9438 MACRO IC 3 Node 12 Reg. 0 $2FB438
MACRO IC 1 Node 13 Reg. 0 $2F943C MACRO IC 3 Node 13 Reg. 0 $2FB43C
If Turbo PMAC2 is doing the commutation for the motor, it is best to use the previous phase position
register in RAM as the servo feedback register. The commutation algorithm has already read the raw
position data from the MACRO ring and copied it into this register, storing it for calculations in its next
cycle. Using this register in the conversion table ensures that the servo algorithm uses the same position
that the commutation used, even if new data has started coming in from the MACRO ring for the next
cycle.