
Instructions










Table Of Contents
- Verwendung dieses Benutzerhandbuchs
- Inhalt
- Produktbeschreibung
- Module und Funktionen
- Verwenden der RoboMaster-App
- Omnidirektionales Fahrgestell
- Intelligenter Controller
- Kamera
- Lautsprecher
- Intelligent Battery
- Beschreibung der LED-Anzeigen des Roboters
- Servo
- Roboterarm und Greifer
- Stromanschlussmodul
- Infrarot-Abstandssensor (TOF)
- Sensoradapter
- Gerade Verbindungsstange
- Vorderachsen-Erweiterungsplattform
- Erweiterungsbaustein
- Der Roboter und Drittanbieter-Plattformen
- Gamepad (Nicht im Lieferumfang enthalten)
- Bedienung Ihres Roboters
- Gameplay
- Anhang
30
©
2020 DJI. Alle Rechte vorbehalten.
ROBOMASTER EP Core
Benutzerhandbuch
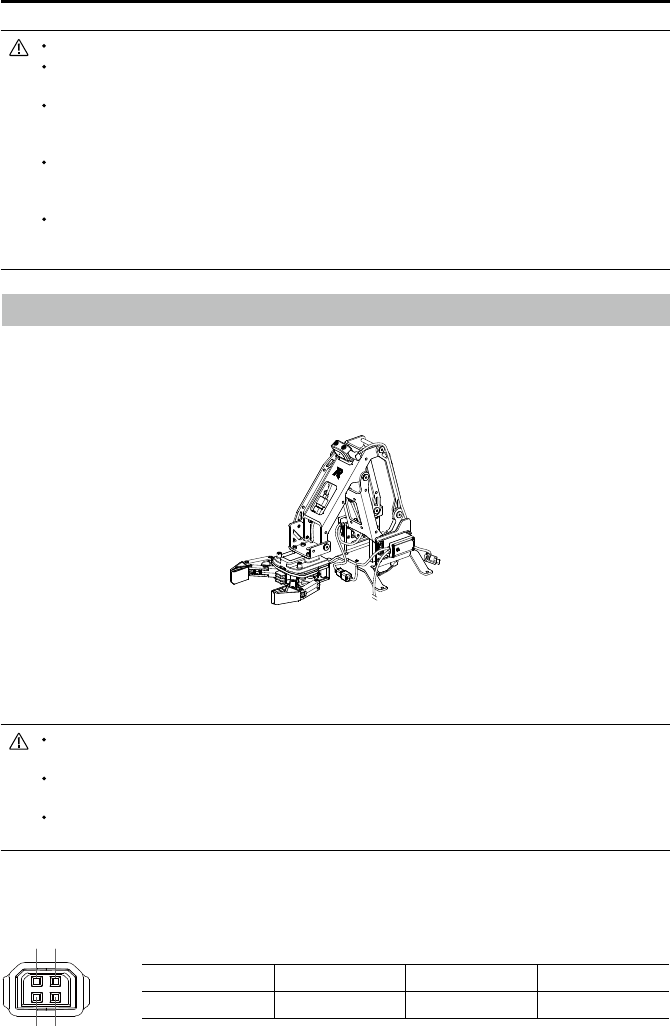
Roboterarm und Greifer
Einführung
Der Roboterarm unterstützt eine präzise Steuerung aus der Ich-Perspektive (FPV) und lässt sich mit
dem Greifer verwenden. Greifen und bewegen Sie Objekte, indem Sie in der RoboMaster-App den
Roboterarm und den Greifer aus der Ich-Perspektive (FPV) steuern.
Benutzungshinweise
Üben Sie während des Betriebs KEINE äußerliche Kraft auf Roboterarm oder Greifer aus.
Der Bewegungsbereich des Roboterarms und der Greifabstand des Greifers lassen sich steuern.
Der horizontale Bewegungsumfang des Roboterarms beträgt 0 bis 0,22 m, der vertikale 0 bis
0,15 m. Der Greifabstand des Greifers beträgt 10 cm.
Um Verletzungen zu vermeiden, berühren Sie NICHT den Roboterarm oder den Greifer,
solange diese in Betrieb sind.
Schlagen oder beschädigen Sie NICHT den Roboterarm oder den Greifer. Andernfalls
kann die Leistung beeinträchtigt werden oder der Servo anormal arbeiten.
Entfernen Sie Fremdkörper wie etwa Tröpfchen rechtzeitig. Andernfalls kann es zur
Korrosion der Oberächenstruktur kommen.
Greifer-PWM-Anschluss
Die Anschlusspins sind wie folgt belegt:
Berühren Sie den Servo während des Betriebs NICHT, um Verletzungen zu vermeiden.
Schlagen Sie NICHT auf den Servo. Andernfalls kann die Lebensdauer des Servos
verkürzt werden oder es sogar zu dauerhaften Schäden kommen.
Wenn in der App mehrfach Warnmeldungen zu Servoüberlastung angezeigt werden,
stoppen Sie sofort den Betrieb und überprüfen Sie den Vorgang und den Zustand des
Roboterarms bzw. des Servos.
Wenn Sie den Servo am Roboterarm befestigen, verwenden Sie die
Programmierschnittstelle mit Vorsicht, um die Begrenzungsvorrichtung des Roboterarms
nicht zu beeinträchtigen.
Wenn sich der Servo im PWM-Modus bendet, lässt sich dessen Status nicht auf einem
Computer anzeigen. Der aktuelle Status des Servos kann an der LED-Anzeige abgelesen
werden.
1 2 3
4
485A/PWM 485B VCC-12 V GND
1
4
2
3