
Installation Manual







Parameter Descriptions
H-Max HVAC Drives MN04008006E—January 2012 www.eaton.com 69
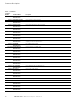
P2.9… , continued
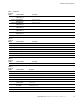
P2.10…
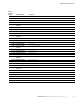
P2.11…
P2.12…
Parameter
Number Parameter Name Description
P2.9.2.3.6 FB 2 Source,
PID Controller 2
Define where feedback signal is from
P2.9.2.3.7 FB 2 Minimum,
PID Controller 2
Minimum Unit Value
P2.9.2.3.8 FB 2 Maximum,
PID Controller 2
Maximum Unit Value
P2.9.2.4.1 Enable Superv,
PID Controller 2
Controls the actual value within predefined limits. Can detect a major pipe burst or unnecessary flooding
P2.9.2.4.2 Upper limit,
PID Controller 2
Upper actual/process value supervision
P2.9.2.4.3 Lower limit,
PID Controller 2
Lower actual/process value supervision
P2.9.2.4.4 Delay, PID Controller 2 If the desired value is not reached within this time a fault or alarm is created
Parameter
Number Parameter Name Description
P2.10.1 Preset Freq 1 Used according to state of digital inputs Preset Frequency Sel0, Sel1, Sel2
P2.10.2 Preset Freq 2 Same as Preset Freq 1
P2.10.3 Preset Freq 3 Same as Preset Freq 1
P2.10.4 Preset Freq 4 Same as Preset Freq 1
P2.10.5 Preset Freq 5 Same as Preset Freq 1
P2.10.6 Preset Freq 6 Same as Preset Freq 1
P2.10.7 Preset Freq 7 Same as Preset Freq 1
Parameter
Number Parameter Name Description
P2.11.1 Firemode Freq Frequency to be used in when fire mode is activated. This will be hidden if in Multi-Pump Mode
Parameter
Number Parameter Name Description
P2.12.1 Number of motors Total number of motors/pumps used with the Multi-Pump System
P2.12.2 Interlock function Input tells the drive if a motor/pump is connected or not
P2.12.3 Include FC Input tells the drive if the motor/pump is included in the autochange and interlock system
P2.12.4 Autochange Autochange will rotate the starting order/priority of the motors in the system to get equal wear on all motors
P2.12.5 Autochange interval Defines how often to rotate starting order of motors/pumps
P2.12.6 Autochange:
frequency limit
An autochange is done when the autochange interval has elapsed and the drive is running below autochange
frequency limit
P2.12.7 Autochange:
motor limit
An autochange is done when the autochange interval has elapsed and the number of running motors is less than
autochange motor limit
P2.12.8 Bandwidth Percentage of the setpoint defining when motor disconnection of removal will not take place
P2.12.9 Bandwidth delay With feedback outside the bandwidth, this time must pass before pumps are added or removed