
Manual










Table Of Contents
- 1. Overview
- 2. Specifications and Name of Each Part
- 2.1 General Specifications
- 2.2 External Dimensions
- 2.3 Name and Function of Each Part
- [1] Gateway status indicator LEDs
- [2] SIO communication status LEDs
- [3] Mode setting switch
- [4] External port switching input
- [5] Controller communication lines
- [6] DeviceNet communication connector
- [7] Baud-rate setting switches
- [8] Node-address setting switches
- [9] DeviceNet communication status LEDs
- [10] Port switch
- [11] Teaching pendant/PC connector
- [12] Power-supply input
- 3. Installation and Noise Elimination Measures
- 4. Wiring
- 4.1 Overall Configuration
- 4.2 I/O Signals of Gateway Unit
- 4.3 Design of SIO Communication Network (SIO Communication)
- 4.3.1 Wiring
- (1) Basics
- (2) Linking PCON/ACON/SCON controllers via SIO communication
- (3) Linking ERC2-SE controllers via SIO communication
- (4) Linking ERC2-NP/PN controllers via SIO communication
- (5) Wiring the emergency stop (EMG) circuit
- [1] Example of cutting off drive signals
- [2] Example of cutting off motor drive power
- 4.3.2 Axis Number Setting
- 4.3.1 Wiring
- 4.4 How to Connect Teaching Tools When Grounding the Positive Terminal of the 24-V Power Supply
- 5. Overview of DeviceNet
- 6. Address Configuration of Gateway Unit
- 7. Communication Signal Details
- 7.1 Overview of Communication Signal Timings
- 7.2 Communication Signals and Operation Timings
- (1) Controller ready (PWR)
- (2) Emergency stop (EMGS)
- (3) Alarm (ALM)
- (4) Reset (RES)
- (5) Pause (STP)
- (6) Moving (MOVE)
- (7) Servo ON command (SON)
- (8) Home return command (HOME)
- (9) Positioning start (CSTR)
- (10) Position complete (PEND)
- (11) Command position number (PC1 to PC512)
- (12) Completed position number (PM1 to PM256)
- (13) Zone (PZONE, ZONE1, ZONE2)
- (14) Jog + command/jog- command (JOG+/JOG-)
- (15) Jog/inching switching (JISL)
- (16) Teaching mode command (MOD)
- (17) Position data read command (PWRT)
- (18) Forced brake release (BKRL)
- 7.3 Basic Operation Timings
- 7.4 Command Transmission
- 8. Network System Building Procedure
- 8.1 Procedure
- 8.2 Settings for Controller Communication
- 8.3 Setting the Gateway Unit and PLC Master
- 8.4 Assigning the Master PLC Address by Free Assignment
- 8.5 Assigning the Master PLC Address by Fixed Assignment
- 9. Example of DeviceNet Operation
- 10. Troubleshooting
DeviceNet Gateway
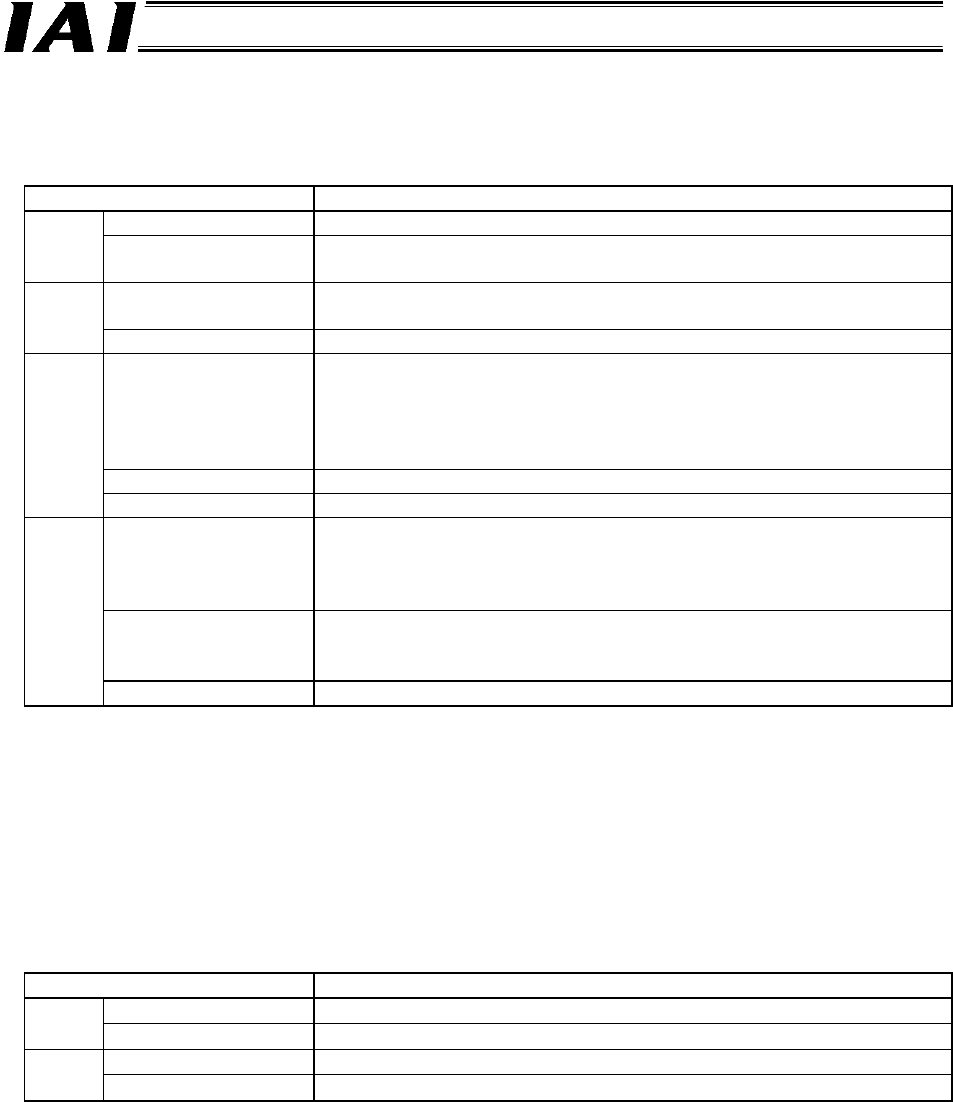
[1] Gateway status indicator LEDs
Each LED indicates the applicable conditions shown in the table below. If any of these LEDs
indicates an abnormality, refer to 10.2, “Troubleshooting.”
Indicated status Description
Steady green The CPU of this unit is operating. RUN
Unlit CPU operation is stopped. If this LED does not come on after turning
on the power, this unit is experiencing a CPU error.
Steady red
(Gateway CPU error)
This unit is experiencing a CPU error or major shutdown failure. G.ER
Unlit Normal
Steady red
(DeviceNet
communication error)
The DeviceNet module is experiencing an error or this unit cannot
recognize the DeviceNet connection. (Check the DeviceNet
communication status per [9].)
Even if this LED is lit, the teaching pendant or PC software can still be
connected as long as the RUN LED is lit.
Blinking red While the port switch is ON, this LED blinks at 1-second intervals.
C.ER
Unlit Normal
Steady red
Steady red (ROBO
Cylinder controller
communication error)
A communication error occurred between this unit and the ROBO
Cylinder controller.
Blinking red (ROBO
Cylinder controller
communication error)
A communication error occurred between this unit and the ROBO
Cylinder controller.
(No response, overrun, framing error or CRC
(*)
error)
T.ER
Unlit Normal
* CRC: Cyclic Redundancy Check
A data error detection method commonly used in synchronous transmission.
[2] SIO communication status LEDs
These LEDs are used to check the communication status between the DeviceNet Gateway and the
ROBO Cylinder controller.
Each LED blinks when the host PLC is communicating with the ROBO Cylinder controller via the
DeviceNet Gateway, or when the ROBO Cylinder controller is communicating with the teaching
pendant or PC software connected via the DeviceNet Gateway.
Indicated status Description
Blinking green
Sending data (DeviceNet Gateway → ROBO Cylinder controller)
TxD
Unlit
Not sending data (DeviceNet Gateway → ROBO Cylinder controller)
Blinking green
Receiving data (ROBO Cylinder controller → DeviceNet gateway)
RxD
Unlit
Not receiving data (ROBO Cylinder controller → DeviceNet gateway)