
Manual










Table Of Contents
- 1. Overview
- 2. Specifications and Name of Each Part
- 2.1 General Specifications
- 2.2 External Dimensions
- 2.3 Name and Function of Each Part
- [1] Gateway status indicator LEDs
- [2] SIO communication status LEDs
- [3] Mode setting switch
- [4] External port switching input
- [5] Controller communication lines
- [6] DeviceNet communication connector
- [7] Baud-rate setting switches
- [8] Node-address setting switches
- [9] DeviceNet communication status LEDs
- [10] Port switch
- [11] Teaching pendant/PC connector
- [12] Power-supply input
- 3. Installation and Noise Elimination Measures
- 4. Wiring
- 4.1 Overall Configuration
- 4.2 I/O Signals of Gateway Unit
- 4.3 Design of SIO Communication Network (SIO Communication)
- 4.3.1 Wiring
- (1) Basics
- (2) Linking PCON/ACON/SCON controllers via SIO communication
- (3) Linking ERC2-SE controllers via SIO communication
- (4) Linking ERC2-NP/PN controllers via SIO communication
- (5) Wiring the emergency stop (EMG) circuit
- [1] Example of cutting off drive signals
- [2] Example of cutting off motor drive power
- 4.3.2 Axis Number Setting
- 4.3.1 Wiring
- 4.4 How to Connect Teaching Tools When Grounding the Positive Terminal of the 24-V Power Supply
- 5. Overview of DeviceNet
- 6. Address Configuration of Gateway Unit
- 7. Communication Signal Details
- 7.1 Overview of Communication Signal Timings
- 7.2 Communication Signals and Operation Timings
- (1) Controller ready (PWR)
- (2) Emergency stop (EMGS)
- (3) Alarm (ALM)
- (4) Reset (RES)
- (5) Pause (STP)
- (6) Moving (MOVE)
- (7) Servo ON command (SON)
- (8) Home return command (HOME)
- (9) Positioning start (CSTR)
- (10) Position complete (PEND)
- (11) Command position number (PC1 to PC512)
- (12) Completed position number (PM1 to PM256)
- (13) Zone (PZONE, ZONE1, ZONE2)
- (14) Jog + command/jog- command (JOG+/JOG-)
- (15) Jog/inching switching (JISL)
- (16) Teaching mode command (MOD)
- (17) Position data read command (PWRT)
- (18) Forced brake release (BKRL)
- 7.3 Basic Operation Timings
- 7.4 Command Transmission
- 8. Network System Building Procedure
- 8.1 Procedure
- 8.2 Settings for Controller Communication
- 8.3 Setting the Gateway Unit and PLC Master
- 8.4 Assigning the Master PLC Address by Free Assignment
- 8.5 Assigning the Master PLC Address by Fixed Assignment
- 9. Example of DeviceNet Operation
- 10. Troubleshooting
46
DeviceNet Gateway
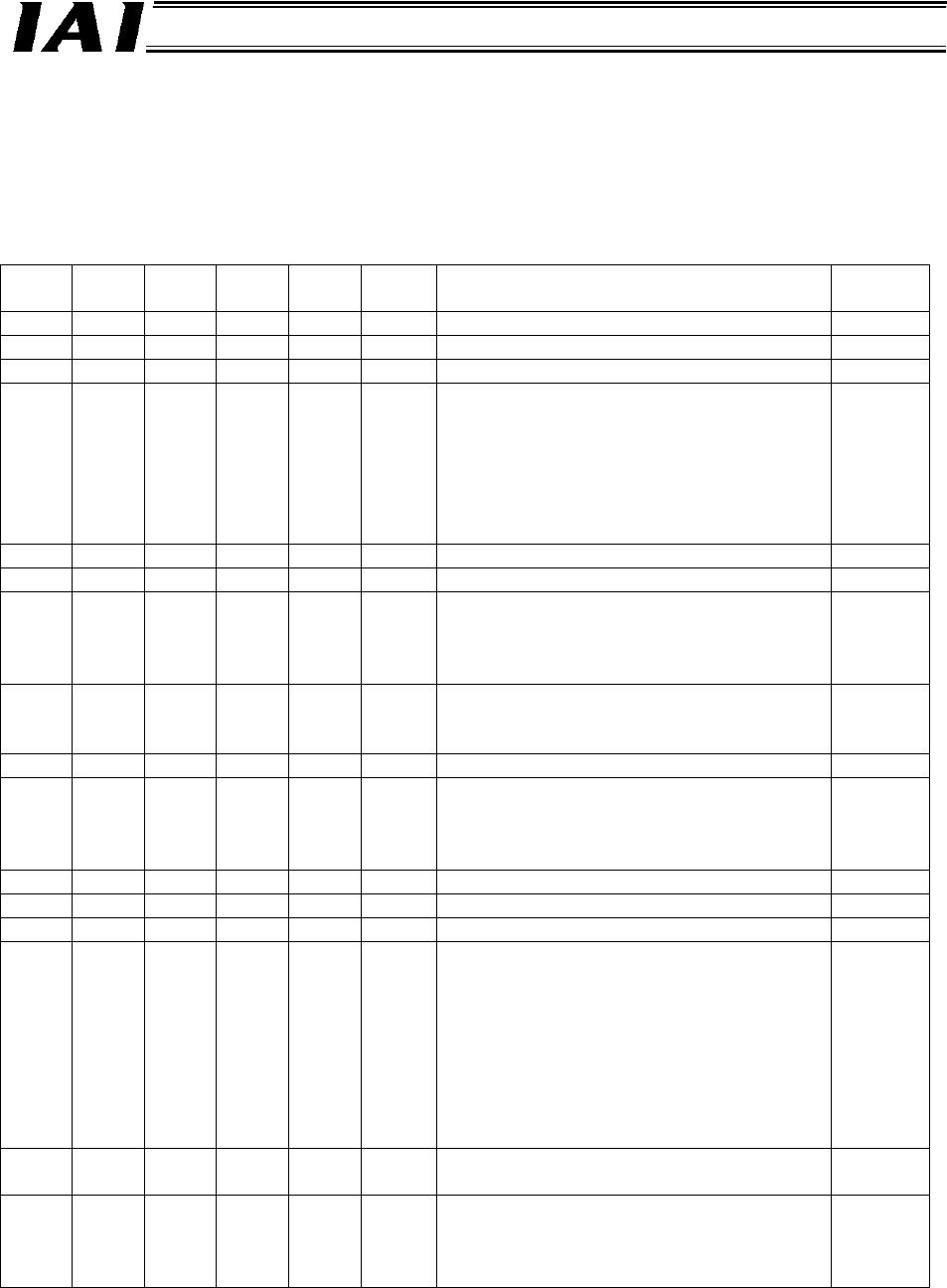
[Alarm Description List]
The list below shows the alarm descriptions to be output by PM8 to PM1 (as a binary code) while the
corresponding alarms are present. For details of alarm descriptions, refer to the operation manual for the
controller.
: ON X: OFF
ALM PM8 PM4 PM2 PM1
Output
code
Description *2 Remarks
X - - - - - Normal
X X X
1 Used by the manufacturer *1
X X
X 2 Used by the manufacturer *1
X X
3
Movement command at servo OFF (80)
Position command before completion of
home return (82)
Absolute position movement command
before completion of home return (83)
Movement command during home return
(84)
X
X X 4 PCB mismatch error (F4)
X
X
5 Non-volatile memory write error (F7) *1
X
X 6
Parameter data error (A1)
Position data error (A2)
Position command information data error
(A3)
X
7
Excitation detection error (B8)
Operation timeout during home return
operation (BE)
X X X 8 Excessive actual speed (C0)
X X
9
Overvoltage (C9)
Overheat (CA)
Control power-supply voltage error (CC)
Control power-supply voltage low (CE)
X
X A Used by the manufacturer *1
X
B Position deviation counter overflow (D8)
X X C Servo error (C1)
X
D
Open phase A, B (E8)
Open phase A (E9)
Open phase B (EA)
RCP2 absolute encoder error detection 1
(ED)
RCP2 absolute encoder error detection 2
(EE)
RCP2 absolute encoder error detection 3
(EF)
X E
CPU error (FA)
FPGA error (FB)
F
Non-volatile memory rewrite life exceeded
(F5)
Non-volatile memory write timeout (F6)
Non-volatile memory data corrupted (F7)
*1 These errors will not occur while the gateway unit is in use.
*2 The alarm codes displayed on the PC software screen or teaching pendant are shown in parentheses.