
Manual










Table Of Contents
- 1. Overview
- 2. Specifications and Name of Each Part
- 2.1 General Specifications
- 2.2 External Dimensions
- 2.3 Name and Function of Each Part
- [1] Gateway status indicator LEDs
- [2] SIO communication status LEDs
- [3] Mode setting switch
- [4] External port switching input
- [5] Controller communication lines
- [6] DeviceNet communication connector
- [7] Baud-rate setting switches
- [8] Node-address setting switches
- [9] DeviceNet communication status LEDs
- [10] Port switch
- [11] Teaching pendant/PC connector
- [12] Power-supply input
- 3. Installation and Noise Elimination Measures
- 4. Wiring
- 4.1 Overall Configuration
- 4.2 I/O Signals of Gateway Unit
- 4.3 Design of SIO Communication Network (SIO Communication)
- 4.3.1 Wiring
- (1) Basics
- (2) Linking PCON/ACON/SCON controllers via SIO communication
- (3) Linking ERC2-SE controllers via SIO communication
- (4) Linking ERC2-NP/PN controllers via SIO communication
- (5) Wiring the emergency stop (EMG) circuit
- [1] Example of cutting off drive signals
- [2] Example of cutting off motor drive power
- 4.3.2 Axis Number Setting
- 4.3.1 Wiring
- 4.4 How to Connect Teaching Tools When Grounding the Positive Terminal of the 24-V Power Supply
- 5. Overview of DeviceNet
- 6. Address Configuration of Gateway Unit
- 7. Communication Signal Details
- 7.1 Overview of Communication Signal Timings
- 7.2 Communication Signals and Operation Timings
- (1) Controller ready (PWR)
- (2) Emergency stop (EMGS)
- (3) Alarm (ALM)
- (4) Reset (RES)
- (5) Pause (STP)
- (6) Moving (MOVE)
- (7) Servo ON command (SON)
- (8) Home return command (HOME)
- (9) Positioning start (CSTR)
- (10) Position complete (PEND)
- (11) Command position number (PC1 to PC512)
- (12) Completed position number (PM1 to PM256)
- (13) Zone (PZONE, ZONE1, ZONE2)
- (14) Jog + command/jog- command (JOG+/JOG-)
- (15) Jog/inching switching (JISL)
- (16) Teaching mode command (MOD)
- (17) Position data read command (PWRT)
- (18) Forced brake release (BKRL)
- 7.3 Basic Operation Timings
- 7.4 Command Transmission
- 8. Network System Building Procedure
- 8.1 Procedure
- 8.2 Settings for Controller Communication
- 8.3 Setting the Gateway Unit and PLC Master
- 8.4 Assigning the Master PLC Address by Free Assignment
- 8.5 Assigning the Master PLC Address by Fixed Assignment
- 9. Example of DeviceNet Operation
- 10. Troubleshooting
71
DeviceNet Gateway
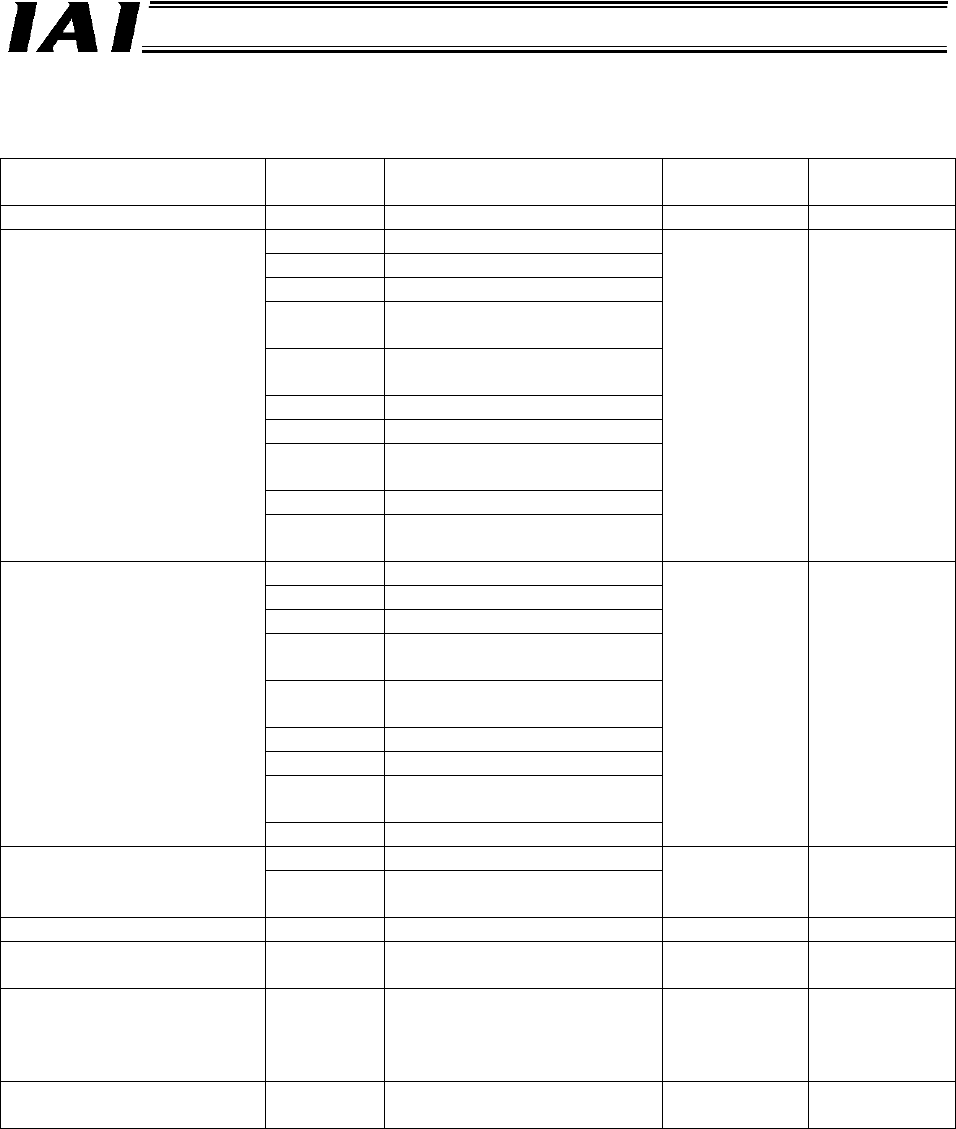
(2) Command list
The available commands and corresponding command codes are listed below.
Function category Code Description
Positioner
operation axis
Simple direct
operation axis
Handshake 0000H Clear a request command
{ {
1000H Write a target position
1001H Write a positioning band
1002H Write a speed
1003H
Write an individual zone
boundary +
1004H
Write an individual zone
boundary –
1005H Write an acceleration
1006H Write a deceleration
1007H
Write a current-limiting value
for push-motion operation
1008H Write a load current threshold
Position table data write
1009H
Write a push-motion
operation setting
{
X
1040H Read a target position
1041H Read a positioning band
1042H Read a speed
1043H
Read an individual zone
boundary +
1044H
Read an individual zone
boundary –
1045H Read an acceleration
1046H Read a deceleration
1047H
Read a current-limiting value
for push-motion operation
Position table data read
1048H Read a load current threshold
{
X
0DA0H Write a POS write coil Position table data write
(ROM)
02E0H
Read a POS write completion
coil
{
X
Present alarm code read 0342H Read a present alarm code
{ {
Current position read
0440H
Read the current position of a
specified axis
{ {
Group-specified broadcast
0D03H
Synchronously move multiple
axes to the position
corresponding to the same
POS number
{
X
PIO/Modbus control
switching
0DA1H
Switch between PIO and
Modbus modes.
X
{
: Available, X: Not available