
Computer Drive User Manual










Table Of Contents
- 1.0 Introduction 1
- 2.0 Drive specifications 3
- 2.1 Formatted capacity 8
- 2.2 Default logical geometry 8
- 2.3 Recording and interface technology 8
- 2.4 Physical characteristics 9
- 2.5 Seek time 9
- 2.6 Start/stop times 10
- 2.7 Power specifications 10
- 2.8 Environmental specifications 14
- 2.9 Acoustics 16
- 2.10 Electromagnetic immunity 16
- 2.11 Reliability 17
- 2.12 Agency certification 17
- 2.13 Environmental protection 19
- 2.14 Corrosive environment 19
- 3.0 Configuring and mounting the drive 21
- 4.0 Serial ATA (SATA) interface 25
- 5.0 Seagate Technology support services 35
- Figure 1. Typical 5V startup and operation current profile 12
- Figure 2. Typical 12V startup and operation current profile 12
- Figure 3. Serial ATA connectors 22
- Figure 4. Attaching SATA cabling 22
- Figure 5. Mounting dimensions (1000 GB models) 23
- Figure 6. Mounting dimensions (320 and 160 GB models) 24
- 1.0 Introduction
- 2.0 Drive specifications
- 2.1 Formatted capacity
- 2.2 Default logical geometry
- 2.3 Recording and interface technology
- 2.4 Physical characteristics
- 2.5 Seek time
- 2.6 Start/stop times
- 2.7 Power specifications
- 2.8 Environmental specifications
- 2.9 Acoustics
- 2.10 Electromagnetic immunity
- 2.11 Reliability
- 2.12 Agency certification
- 2.13 Environmental protection
- 2.14 Corrosive environment
- 3.0 Configuring and mounting the drive
- 4.0 Serial ATA (SATA) interface
- 5.0 Seagate Technology support services
- Index
22 DiamondMax 22 Serial ATA Product Manual, Rev. A
3.2 Configuring the drive
Each drive on the Serial ATA interface connects point-to-point with the Serial ATA host adapter. There is no
master/slave relationship because each drive is considered a master in a point-to-point relationship. If two
drives are attached on one Serial ATA host adapter, the host operating system views the two devices as if they
were both “masters” on two separate ports. Both drives behave as if they are Device 0 (master) devices.
Serial ATA drives are designed for easy installation. It is usually not necessary to set any jumpers on the drive
for proper operation; however, if you connect the drive and receive a “drive not detected” error, your SATA-
equipped motherboard or host adapter may use a chipset that does not support SATA speed autonegotiation. If
you have a motherboard or host adapter that does not support autonegotiation:
• Install a jumper as shown in Figure 3 below to limit the data transfer rate to 1.5 Gbits per second (and leave
the drive connected to the SATA-equipped motherboard or host adapter that doesn’t support autonegotiation)
or
• Install a SATA host adapter that supports autonegotiation, leave the drive jumper block set to “Normal
operation” (see Figure
3 below), and connect the drive to that adapter. This option has the benefit of not limiting
the drive to a 1.5 Gbits/sec transfer rate.
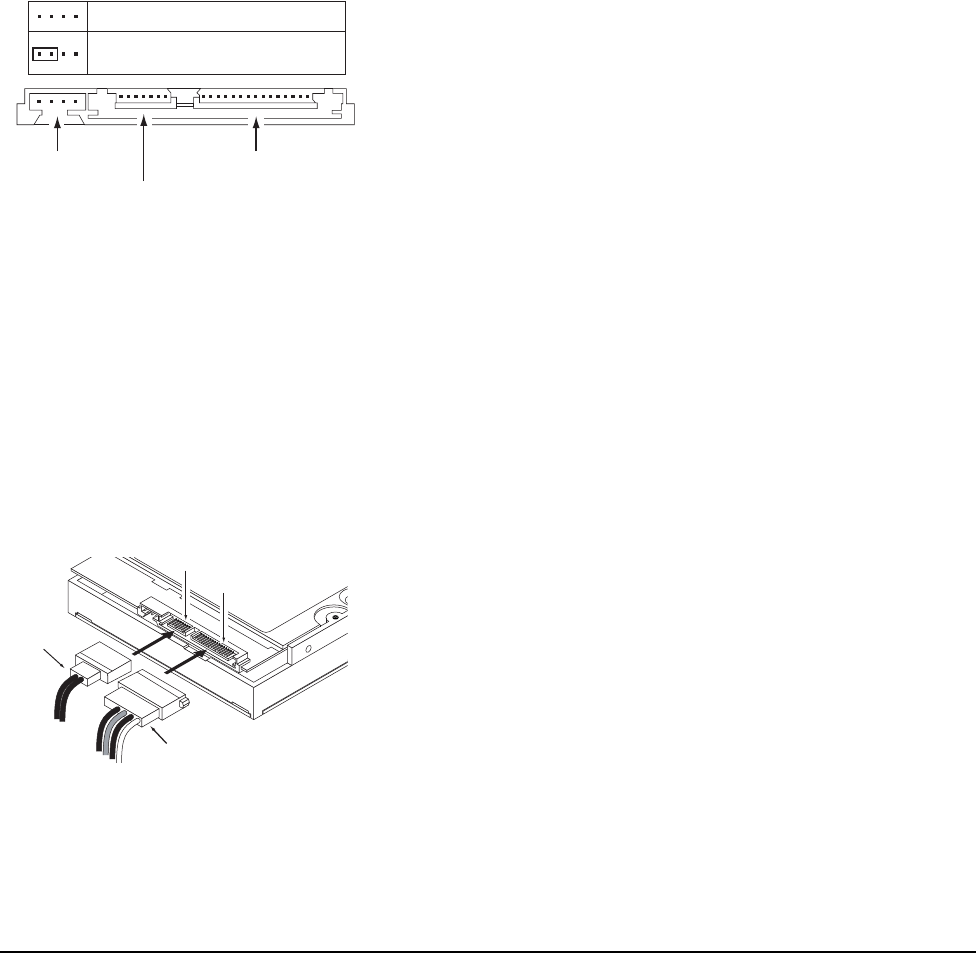
Figure 3. Serial ATA connectors
3.3 Serial ATA cables and connectors
The Serial ATA interface cable consists of four conductors in two differential pairs, plus three ground connec-
tions. The cable size may be 30 to 26 AWG with a maximum length of one meter (39.37 inches). See Table 7
for connector pin definitions. Either end of the SATA signal cable can be attached to the drive or host.
For direct backplane connection, the drive connectors are inserted directly into the host receptacle. The drive
and the host receptacle incorporate features that enable the direct connection to be hot pluggable and blind
mateable.
For installations which require cables, you can connect the drive as illustrated in Figure 4.
Figure 4. Attaching SATA cabling
Each cable is keyed to ensure correct orientation. DiamondMax 22 Serial ATA drives support latching SATA
connectors.
Jumper block
SATA interface connector
SATA power connector
Limit data transfer rate to
1.5 Gbits per second
3.0 Gbits per second operation
Power cable
Signal cable
Signal connector
Power connector