
Datasheet










2010 Microchip Technology Inc. Preliminary DS22266A-page 7
MCP7941X
3.0 I
2
C™ BUS CHARACTERISTICS
3.1 I
2
C Interface
The MCP7941X supports a bidirectional 2-wire bus and
data transmission protocol. A device that sends data
onto the bus is defined as transmitter, and a device
receiving data as receiver. The bus has to be controlled
by a master device which generates the Start and Stop
conditions, while the MCP7941X works as slave. Both
master and slave can operate as transmitter or receiver
but the master device determines which mode is
activated.
3.1.1 BUS CHARACTERISTICS
The following bus protocol has been defined:
• Data transfer may be initiated only when the bus
is not busy.
• During data transfer, the data line must remain
stable whenever the clock line is high. Changes in
the data line while the clock line is high will be
interpreted as a Start or Stop condition.
Accordingly, the following bus conditions have been
defined (Figure 3-1).
3.1.1.1 Bus not Busy (A)
Both data and clock lines remain high.
3.1.1.2 Start Data Transfer (B)
A high-to-low transition of the SDA line while the clock
(SCL) is high determines a Start condition. All
commands must be preceded by a Start condition.
3.1.1.3 Stop Data Transfer (C)
A low-to-high transition of the SDA line while the clock
(SCL) is high determines a Stop condition. All
operations must end with a Stop condition.
3.1.1.4 Data Valid (D)
The state of the data line represents valid data when,
after a Start condition, the data line is stable for the
duration of the high period of the clock signal.
The data on the line must be changed during the low
period of the clock signal. There is one bit of data per
clock pulse.
Each data transfer is initiated with a Start condition and
terminated with a Stop condition. The number of the
data bytes transferred between the Start and Stop
conditions is determined by the master device.
3.1.1.5 Acknowledge
Each receiving device, when addressed, is obliged to
generate an Acknowledge signal after the reception of
each byte. The master device must generate an extra
clock pulse which is associated with this Acknowledge
bit.
A device that acknowledges must pull down the SDA
line during the Acknowledge clock pulse in such a way
that the SDA line is stable-low during the high period of
the Acknowledge-related clock pulse. Of course, setup
and hold times must be taken into account. During
reads, a master must signal an end of data to the slave
by NOT generating an Acknowledge bit on the last byte
that has been clocked out of the slave. In this case, the
slave (MCP7941X) will leave the data line high to
enable the master to generate the Stop condition.
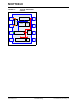
FIGURE 3-1: DATA TRANSFER SEQUENCE ON THE SERIAL BUS
Note: The MCP7941X does not generate any
EEPROM Acknowledge bits if an internal
programming cycle is in progress. The
user may still access the SRAM and RTCC
registers during an EEPORM write.
Address or
Acknowledge
Valid
Data
Allowed
to Change
Stop
Condition
Start
Condition
SCL
SDA
(A) (B) (D) (D) (C) (A)