
User manual










34
Wenn die „IOC“-Funktion aktiviert wurde, beziehen sich die Bewegungsrichtungen des Quadrocopters nicht mehr auf
seine Bauform. Die Bewegungsrichtung des Quadrocopters ändert sich je nachdem, welcher Modus innerhalb der
„IOC“-Funktion aufgerufen wurde.
Wichtig!
Für die „IOC“-Funktion ist der gleichzeitige Empfang von mehr als 6 GPS-Satelliten erforderlich und der
Quadrocopter muss mehr als 5 m von der Startstelle entfernt sein, dann stehen insgesamt drei Modi zur
Verfügung:
• „CL-Mode“(=„CourseLock“)
• „HL-Mode“(=„HomePointLock“)
• „POI-Mode“(=„PointOfInterest“)
Achtung!
WennsichderQuadrocopterim„IOC-Mode“bendetundweiterentferntiegt,solltenSiedenSchalter
„IOC“ nicht öfters betätigen, da hierdurch gespeicherte Werte überschrieben werden und z.B. der „Return
home“-Punkt dann ganz woanders liegen wird (siehe auch Kapitel 13).
d) „CL-Mode“
Im „CL-Mode“ (= „Course Lock“) misst der Quadrocopter mit Hilfe seines eingebauten Kompasses seine Ausrichtung.
Wenn der Quadrocopter vor dem Start mit der Vorderseite z.B. auf einen weit entfernten Kirchturm ausgerichtet
wurde,wirderimmerinRichtungKirchturmiegen,wennamSendernachvornegesteuertwird.Auchwennder
Quadrocopter während des Fluges gedreht wurde und mit der Vorderseite in eine andere Richtung ausgerichtet ist.
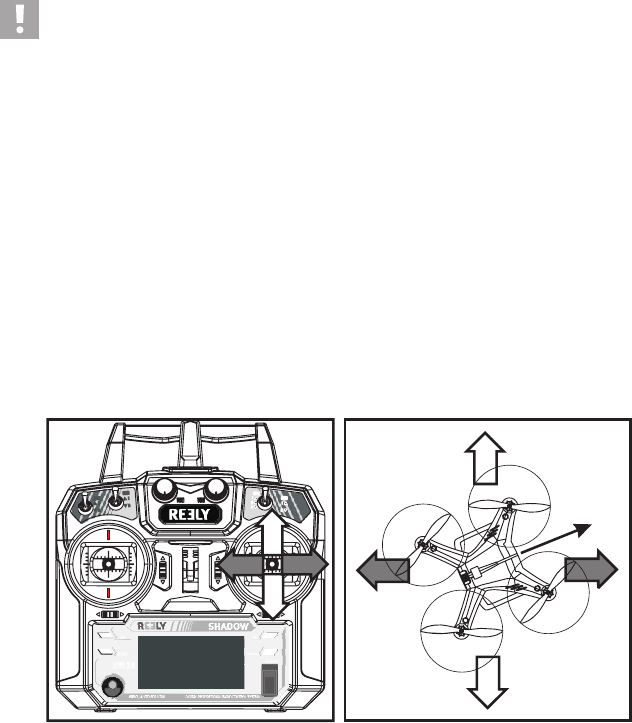
Bild 26