
Co. Ltd. User's Manual smart actuator DX-116










17
English Translation by: Tribotix Pty Ltd
www.tribotix.com
DYNAMIXEL
DX-116
Address 0x20,0x21 Moving Speed
. The angular speed to move to the Goal Position. If set to the
maximum values of 0x3ff, it moves at 70RPM.
Address 0x24,0x25 Present Position
. Current position of the Dynamixel.
Address 0x26,0x27 Present Speed
. Current Speed of the Dynamixel.
Address 0x28,0x29 Present Load
. Load size on the Dynamixel in action. Bit 10 is the direction of the
load.
Load Direction = 0 : CCW Load, Load Direction = 1: CW Load
Address 0x2A Present Voltage
. The voltage applied to the Dynamixel. The value is 10 times the
actual voltage. For example, 10V is read as 100(0x64).
Address 0x2B Present Temperature
. Current internal Dynamixel temperature (Degrees Celsius).
Address 0x2C Registered Instruction
. Set to 1 when a REG_WRITE instruction is made. After an
Action instruction and an action it is reset to 0.
Address 0x2E Moving.
Set to 1 when the Dynamixel moves by its own power.
BIT 15~11 10 9876543210
Value 0 Load Direction Load Value
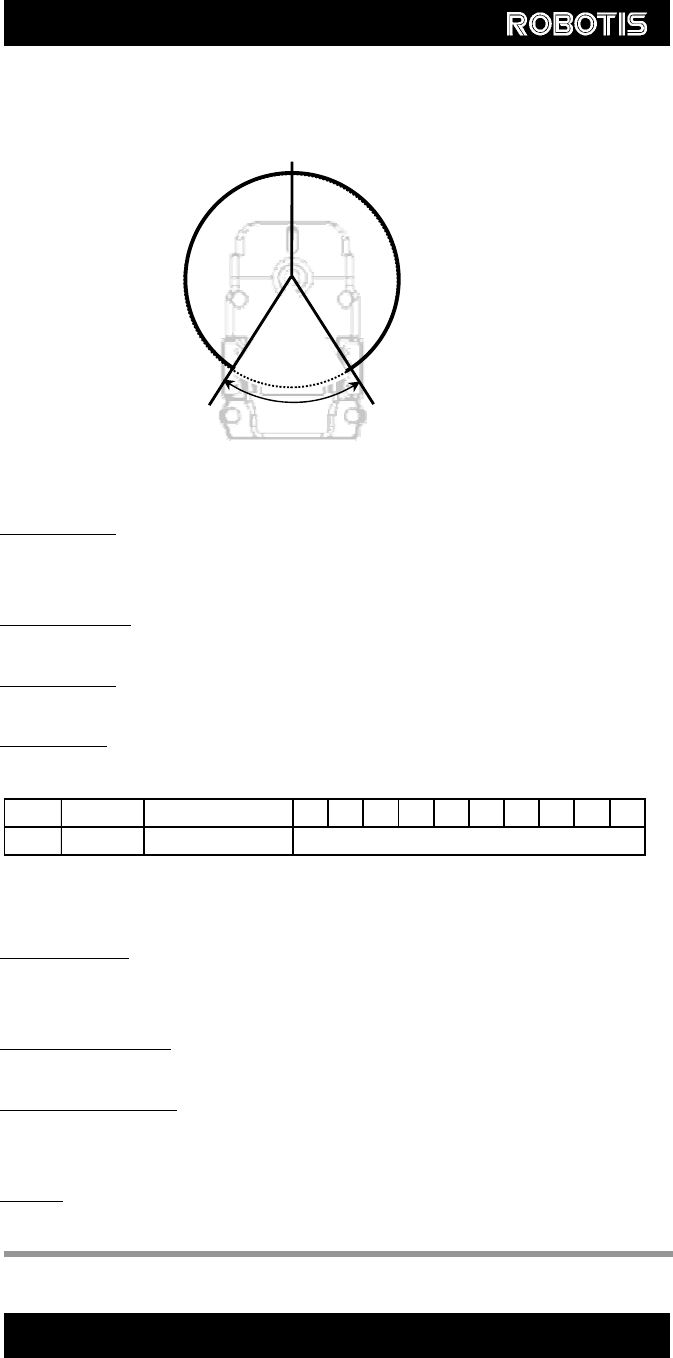
0°
(Goal Position = 0)
300°
(Goal Position = 0x3ff)
150°
(Goal Position = 0x1ff)
330~360°
Invalid Angle