
Co. Ltd. User's Manual smart actuator DX-116










29
English Translation by: Tribotix Pty Ltd
www.tribotix.com
DYNAMIXEL
DX-116
Appendix
RS485 Direction The Main Controller sets the RS485 communication direction to be an input at all
times other than when specifically sending an instruction packet.
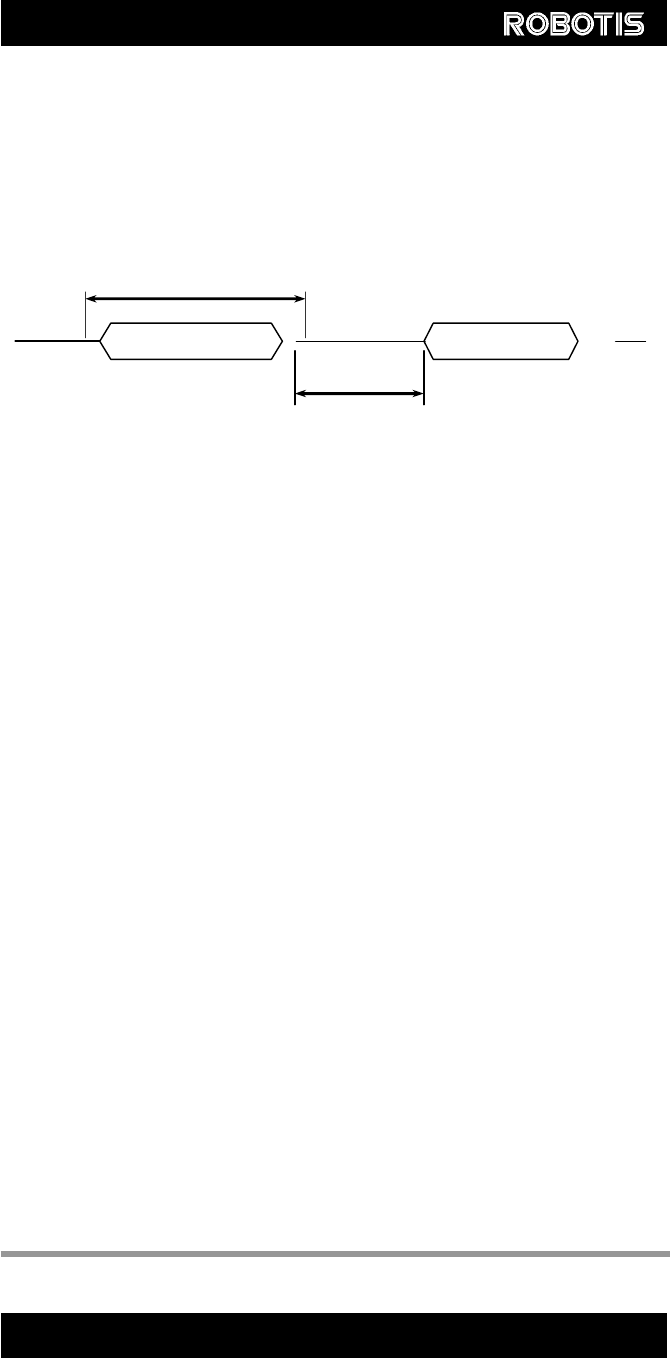
Return Delay Time The Default Value is 160us and can be changed via the Control Table at Address
0x05. The Main Controller needs to change the RS485 communication direction
after sending an instruction packet within the Return Delay time range.
485 Direction The CPU normally indicates the UART_STATUS and the bit definitions within the
register have the following meanings:-
TXD_BUFFER_READY_BIT : Transmission DATA can be loaded into the Buffer.
Note that the SERIAL TX BUFFER is not necessarily completely empty.
TXD_SHIFT_REGISTER_EMPTY_BIT : Set when a Transmission byte has
completed its transmission.
The TXD_BUFFER_READY_BIT is used when a byte is to be transmitted via the
serial communication channel and an example is as follows:-
TxDByte(byte bData)
{
while(!TXD_BUFFER_READY_BIT); //wait until data can be loaded.
SerialTxDBuffer = bData; //data load to TxD buffer
}
When changing the RS485 Direction, check the
Instruction Packet Status Packet
Return Delay Time
RS485 Direction Output Duration