
Manual










Tool Tip Radius Compensation (TTRC)
Function
Chapter 21
21-19
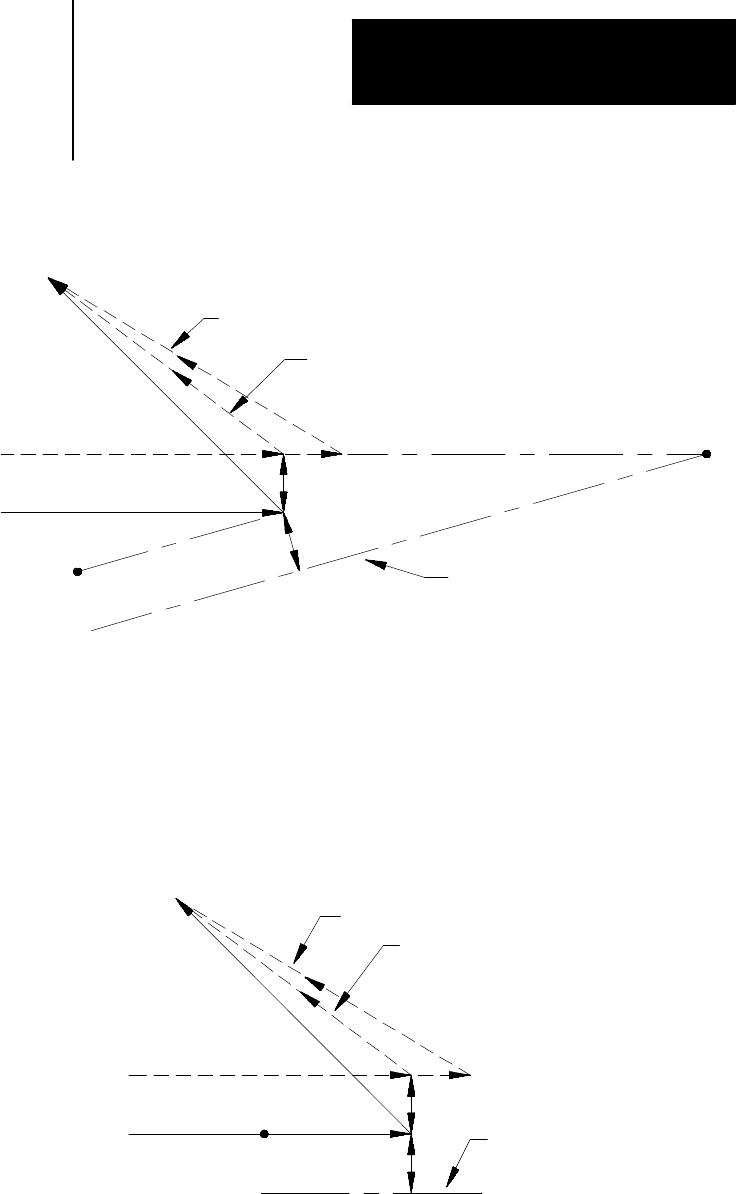
Figure 21.14
Results of Example 21.6
Compensated path using I, K vector
Compensated path if no I, K in G40block
Intercept line
I, K
Programmed path
Compensated path
N10
N11
r
r
r
If the vector defined by I and/or K is parallel to the programmed tool path,
the resulting exit move is offset in the opposite direction of the I and/or K
vector by one radius of the tool.
Figure 21.15
Exit Move When I, K Vector Is Parallel to Programmed Tool Path
Intercept line
Compensated path
Programmed path
I, K
r
r
r
Compensated path using I, K vector
Compensated path if no I, K in G40block
Important: If one I and/or K value is programmed without the second one,
the value of the second I- and/or K-word defaults to 0.