
Instruction Manual



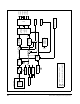






Table Of Contents
- S-3056-1 Distributed Power System SA3100 Drive Configuration and Programming Instruction Manual
- Important User Information
- Contents
- List of Figures
- List of Tables
- Chapter 1 Introduction
- Chapter 2 Configuring the UDC Module, Regulator Type, and Parameters
- 2.1 Adding a Universal Drive Controller (UDC) Module
- 2.2 Entering the Drive Parameters
- 2.3 Configuring the Vector with Constant Power Regulator
- 2.4 Configuring the Volts per Hertz (V/Hz) Regulator
- 2.5 Configuring Flex I/O
- 2.6 Generating Drive Parameter Files and Printing Drive Parameters
- Chapter 3 Configuring the UDC Module’s Registers
- 3.1 Register and Bit Reference Conventions Used in this Manual
- 3.2 Flex I/O Port Registers (Registers 0-23)
- 3.3 UDC/PMI Communication Status Registers (Registers 80-89/1080-1089)
- 3.4 Command Registers (Registers 100-199/1100-1199)
- 3.5 Feedback Registers (Registers 200-299/1200-1299)
- 3.6 Application Registers (Registers 300-599, Every Scan) (Registers 1300-1599, Every Nth Scan)
- 3.7 UDC Module Test I/O Registers (Registers 1000-1017)
- 3.8 Interrupt Status and Control Registers (Registers 2000-2047)
- Chapter 4 Application Programming for DPS Drive Control
- Chapter 5 On-Line Operation
- Appendix A SA3100 Vector Regulator Register Reference
- Appendix B SA3100 Volts / Hertz Regulator Register Reference
- Appendix C SA3100 Local Tunable Variables
- Appendix D Vector with Constant Power Regulator
- Appendix E Volts per Hertz (V/Hz) Regulator
- Appendix F Status of Data in the AutoMax Rack After a STOP_ALL Command or STOP_ALL Fault
- Appendix G Torque Overload Ratio Parameter Precautions
- Appendix H Default Carrier Frequency and Carrier Frequency Limit for Drive Horsepower Ranges
- Appendix I Vector with Constant Power Parameter Entry Example
- Index
C-10
SA3100 Drive Configuration and Programming
C.7 Diagnostic Variables
The programmer enters the values in the diagnostic variables to establish thresholds
at which drive warnings are generated.
RES_GAN% Resolver Gain
When RES_GA% is equal to zero, the gain
tuning procedure is performed automatically by
the operating system. Zero is the default value.
The value can range from 0 to 255 counts, with
1 count representing 0.15 volts of gain.
Units: Counts
Default Value: 0
Low Limit: 0
High Limit: 255
Step: 1
This value should be generated using the auto-tuning procedure because the PMI
Processor can take into account the entire resolver circuit when setting the proper
gain value.
If the gain needs to be re-calibrated, reset the value of RES_GAN% to zero.
However, do not reset the value of RES_GAN% to zero while the inner loop is
running (i.e., TRQ_ON@ is set). If the value is adjusted too low, a drive fault
(register 202/1202, bit 8) will occur.
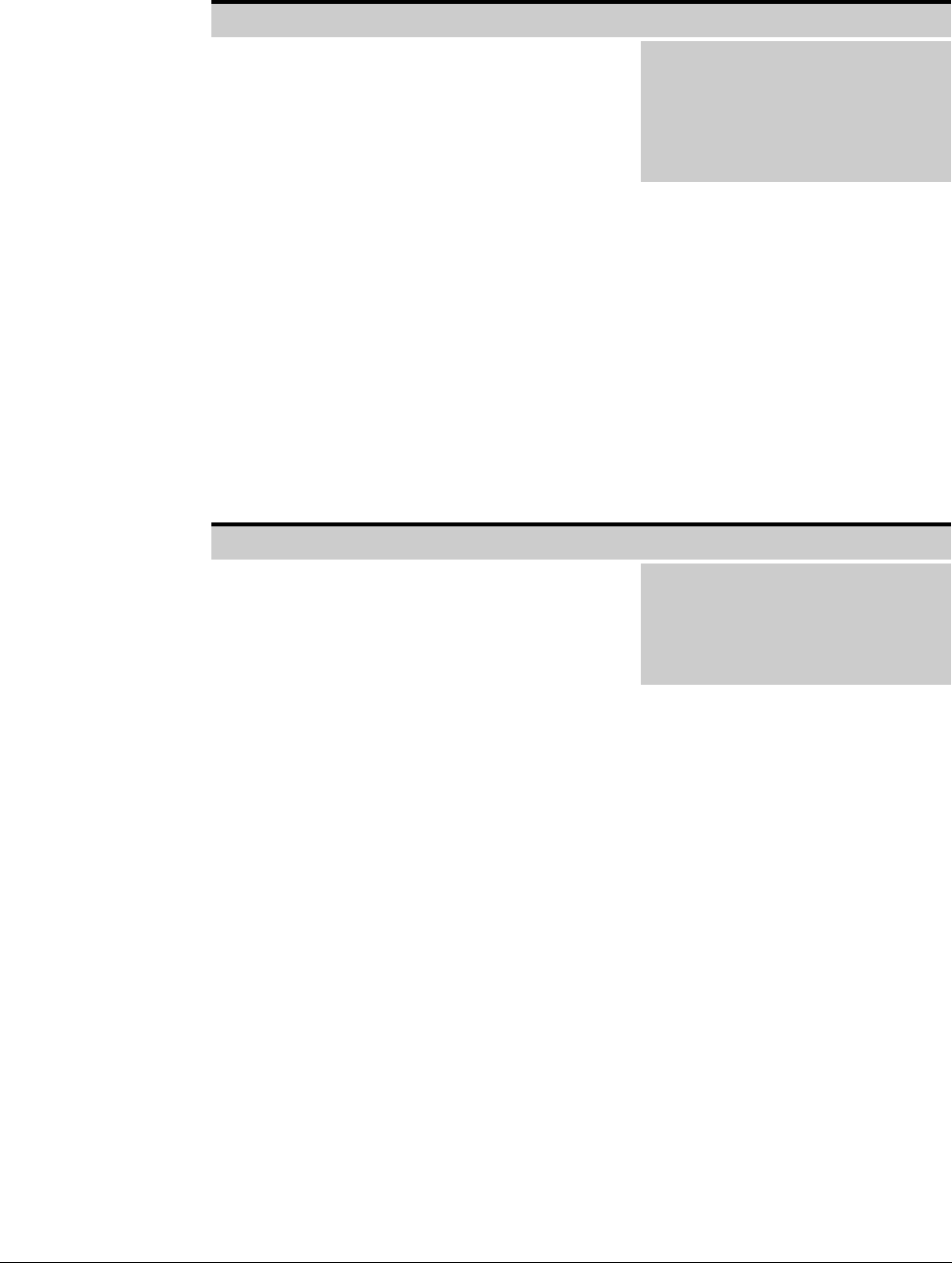
GIT_E1% Ground Current Warning Threshold
A drive warning is generated (203/1203, bit 4) if
ground current exceeds the value stored in this
variable. The value is entered in amps times
10, e.g., 10.1 amps is entered as 101.
Units: Amps
∗
10
Default Value: 100
Low Limit: 10
High Limit: 2000
Step: 1
This value should be set above the value in the ground current feedback register
(208/1208) after the drive is operational.