
User's Manual










Table Of Contents
User’s Manual
http://www.exoatletasia.com
ExoAtlet
Ⓡ
II 62 / 84 Ver 1.0 (2019.03.29.)
⑦ Initiation mode – it is possible to choose three different modes – continuous mode,
step-by-step mode, by effort mode. Their operation is similar to “Walking” modes
description (more details in 8.2.4.1).
The only difference is that when walking on place is stopped in Step-by-Step
or By effort mode exoskeleton will not make a final step and will immediately
get into standing pose awaiting for the next motion.
4) Standing up
After pressing “Standing up” button you will get access to the parameters of
standing up.
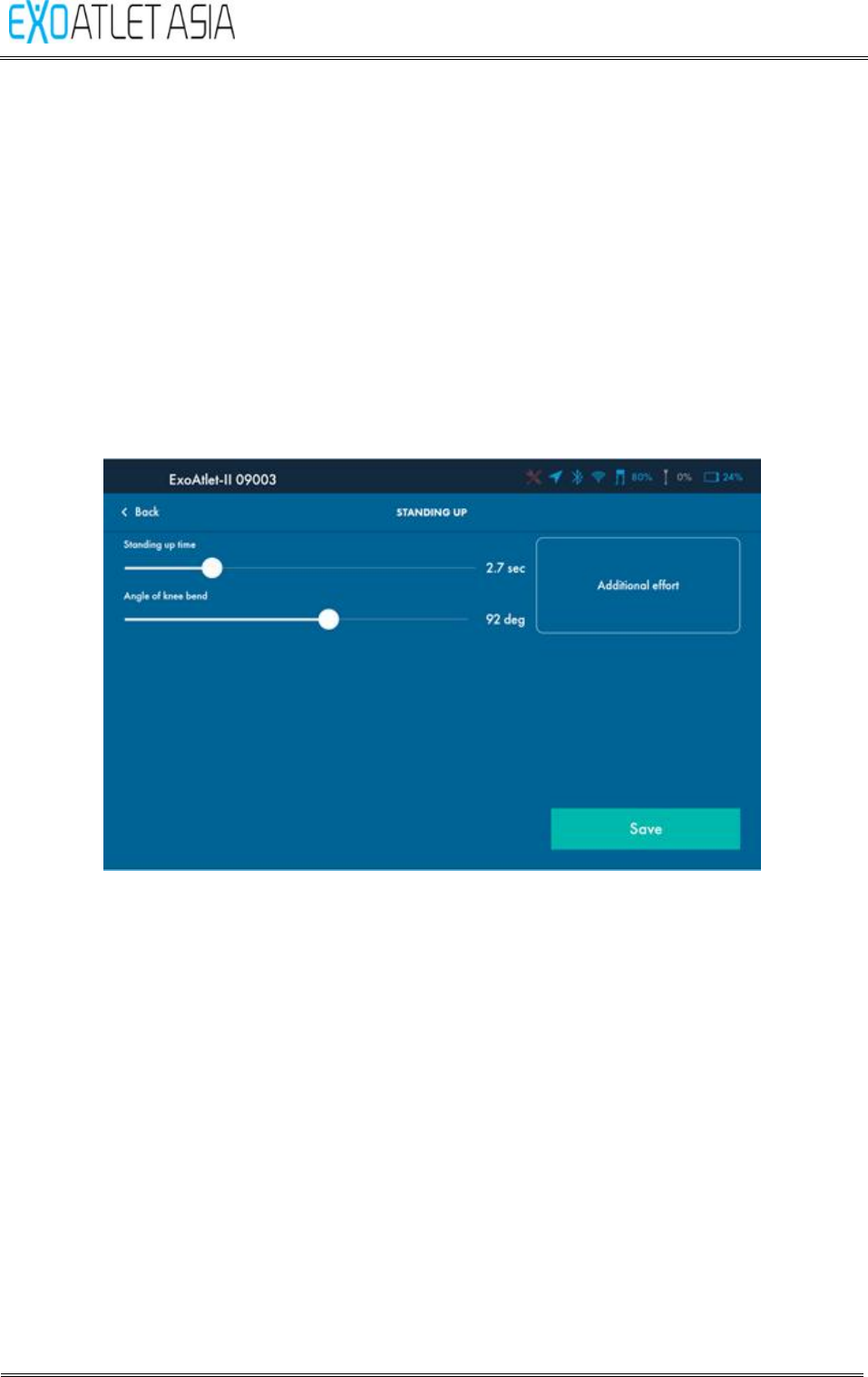
There are several parameters to change (See Figure 68):
Figure 68
① Standing up time – parameter defines the time that exoskeleton will need to get from
sitting to standing position. Min = 2 s, max = 5 s, step = 0,1 s.
② Angle of knee bend – parameters defines how much exoskeleton will bend its knees
before standing up. Min = 80 deg, max = 100 deg, step = 2 deg. Use minimal value in
case of high stool and max value in case of the low stool.
③ Additional effort – definition is similar to the description in “Walking” settings (more
details in 8.2.4.1).
5) Sitting down
After pressing “Sitting down” button you will get access to the parameters of
sitting down.
For this movement only one parameter is available (see Figure 69).
Sitting down time – parameter defines the time that exoskeleton will need to get
from standing to sitting position.