
User`s manual










Table Of Contents
- Safety Precautions
- Table of contents
- Chapter 1: Outline
- 1-1 Features
- 1-2 Controller
- 1-3 Measurement program
- [1] Positional deviation measurement
- [2] Degree of match inspection
- [3] Lead inspection
- [4] BGA/CSP inspection (IV-S32M/S33M)
- [5] Area measurement by binary conversion
- [6] Object counting by binary conversion
- [7] Object identification by binary conversion
- [8] Point measurements
- [9] Distance and angle measurement
- [10] Multiple position measurement (IV-S33M)
- [11] Multiple degree of match inspection (IV-S33M)
- Chapter 2 : Precautions for Use
- Chapter 3 : System Configuration
- Chapter 4 : Part Names and Functions
- Chapter 5 : Connection and Installation Methods
- Chapter 6 : Setting and Operating Outlines
- Chapter 7 : Simplified Menu Operation
- 7-1 Operation screen
- 7-2 Image display
- 7-3 Setting functions that are different with each controller
- 7-4 Setting procedures
- 7-5 Setting the operation conditions
- 7-6 Setting object types
- 7-7 Setting the shutter speed
- 7-8 Setting the positioning conditions
- 7-9 Setting the existence inspection conditions
- 7-10 Measurement triggering
- 7-11 Saving data
- 7-12 Specify the system conditions
- Chapter 8 : Specifications
- Chapter 9 : Operation Examples
- Glossary
- Appendix
- Alphabetical Index
1-11
Outline
1
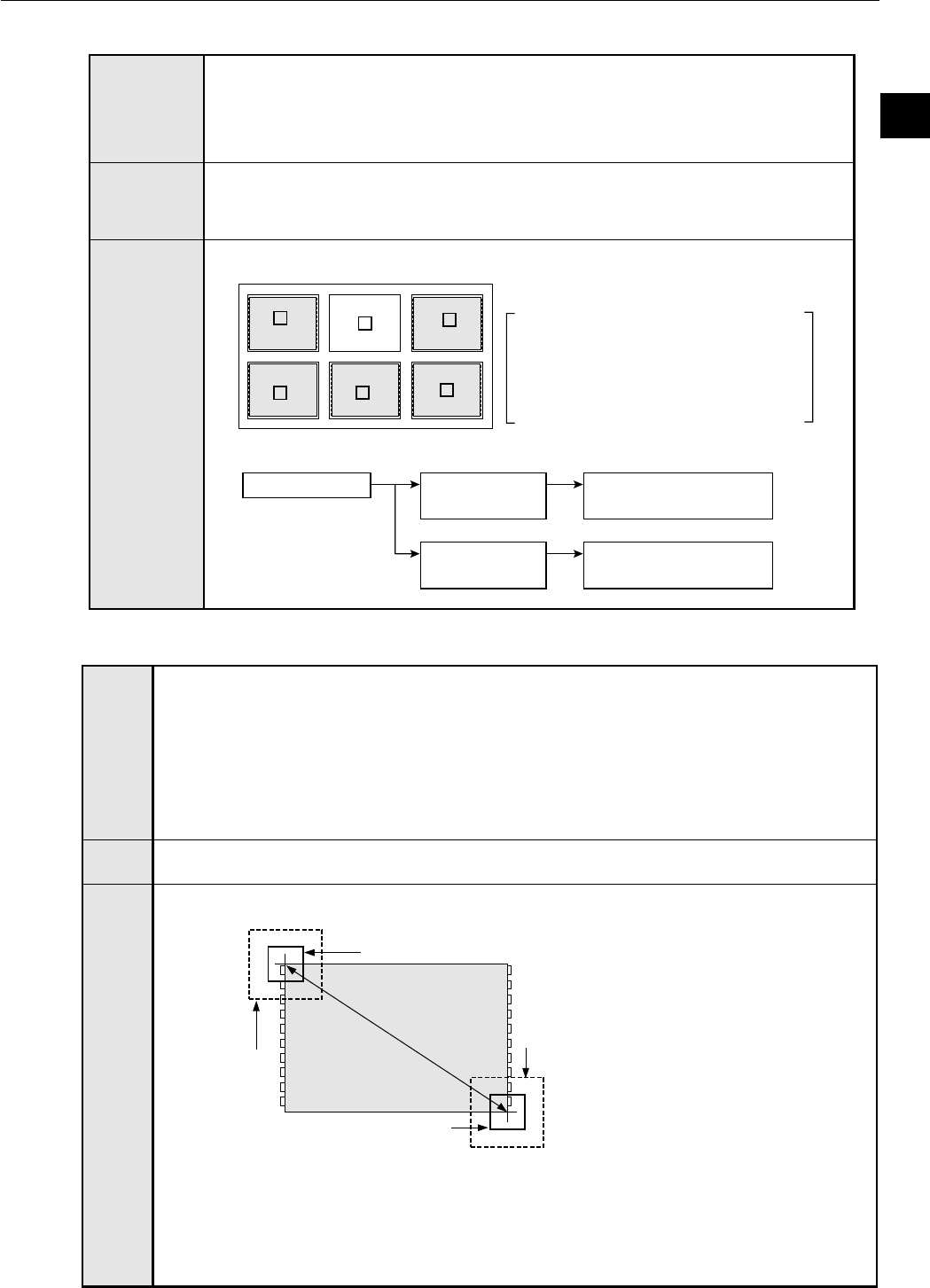
- Inspection procedures
Image capture
Binary
conversion
Black/white evaluation
of points
Average light
level
Light level evaluation
of points
Purpose
Example
Applications
Checking the presence or absence of packed parts, inspecting the working
condition of LEDs or fluorescent character display tubes, and sorting household
electric appliances.
[Inspection at 6 points]
The presence or absence of target objects is examined.
- A simple black or white evaluation is made in the specified pixel area of binary
images.
- The light level in the specified pixel area is averaged, and a decision is made
whether or not it is within the specified lightness range in gray scale images.
Number of points (max.)
: 128 points at average light levels
256 points in binary images
Point size: 2 m x 2n pixels
(m, n = 1 to 16)
[8] Point measurements
[9] Distance and angle measurement
Search area
(criterion image a)
Search area
(criterion image b)
Criterion image b
Criterion image a
Exam-
ple
Appli-
cation
Measurement of mounted electronic parts
Pur-
pose
Measure the distance and angle of two points using the center detection function in a gray
scale search and the edge detection function, as well as center of gravity detection by
functions.
- This function can measure the following distances and angles: distance between two points,
X coordinate distance, Y coordinate distance, the angle between three points, the horizontal
angle of two points, and the vertical angle of two points.
- The following points and lines can be set: center point, circle center point, gravity center,
point where two straight lines cross, line passing through two points.
[Measuring IC packages]
Register criterion image a and b by matching edges of the IC package.
- Measurement procedures
1 Find the center points of criterion images a and b using a 2-point gray scale search.
2 Determine the distance between the two center points.