
Instructions










Parameterliste
8.2 Parameterliste
Umrichter SINAMICS V20
Betriebsanleitung, 05/2017, A5E34560031-007
307
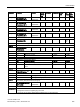
Parameter
Funktion
Bereich
Werks-
einstel-
lung
Änderbar
Skalierung
Daten-
satz
Da-
tentyp
Zu-
griffs-
stufe
Legt die Signalquelle für den Sollwert des Motorpotenziometers fest, wenn der automatische Modus
P2241 ausgewählt ist.
Achtung:
Siehe: P2241
P2243[0...2]
BI: PID-MOP Hochlauf-
geber-Sollwert akzeptie-
ren
0 –
4294967295
0 T - CDS U32 3
Legt fest, dass die Signalquelle für den Einstellungsbefehl den Einstellungswert für das Motorpotenziome-
ter akzeptiert. Der Wert wird für eine 0/1-Flanke des Einstellungsbefehls wirksam.
Achtung:
Siehe: P2244
P2244[0...2]
CI: PID-MOP Hochlauf-
geber-Sollwert
0 –
4294967295
0 T - CDS U32 3
Legt die Signalquelle für den Sollwert des Motorpotenziometers fest. Der Wert wird für eine 0/1-Flanke
des Einstellungsbefehls wirksam.
Achtung:
Siehe: P2243
r2245
CO: PID-MOP Eingangs-
frequenz des Hochlauf-
gebers [%]
- - - - - Gleit-
kom-
ma
3
Zeigt den Sollwert des Motorpotenziometers an, bevor dieser den Hochlaufgeber des PID-MOP passiert
hat.
P2247[0...2]
PID-MOP Hochlaufzeit
des Hochlaufgebers [s]
0,00 – 1000,0 10,00 U, T - DDS Gleit-
kom-
ma
2
Legt die Hochlaufzeit für den internen Hochlaufgeber des PID-MOP fest. Der Sollwert wird innerhalb die-
ses Zeitraums ausgehend von Null bis zu einem oberen Grenzwert geändert, der in P1082 definiert ist.
Achtung:
Siehe: P2248, P1082
P2248[0...2]
PID-MOP Rücklaufzeit
des Hochlaufgebers [s]
0,00 – 1000,0 10,00 U, T - DDS Gleit-
kom-
ma
2
Legt die Rücklaufzeit für den internen Hochlaufgeber des PID-MOP fest. Der Sollwert wird innerhalb die-
ses Zeitraums ausgehend von dem oberen Grenzwert, der in P1082 definiert ist, bis auf Null geändert.
Achtung:
Siehe: P2247, P1082
r2250
CO: Sollwertausgabe
des PID-MOP [%]
- - - PROZENT - Gleit-
kom-
ma
2
Zeigt den Ausgangssollwert des Motorpotenziometers an.
P2251
PID-Modus
0 – 1
0
T
-
-
U16
3
Aktiviert die Funktion des PID-Reglers.
0
PID als Sollwert
1
PID zum Abgleich
Abhängigkeit:
Ist aktiv, wenn der PID-Regelkreis aktiviert ist (siehe P2200).