
Technical data










Function diagrams
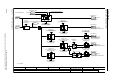
Technology controller
2-634
© Siemens AG 2011 All Rights Reserved
SINAMICS G120 Control Units CU230P-2 Parameter Manual (LH9), 01/2011
Fig. 2-122 7958 – Closed-loop control
- 7958 -
Function diagram
87654321
FP_7958_97_01.vsd
Technology controller
G120 CU230P-2
13.12.2010 V4.4
Closed-loop control
+
+
+
+
<1>
<1>
<1>
+
d
dt
Tec_reg Kp
0.000...1000.000
p2280 (1.000)
<1>
Tec_reg Tn
0.000...60.000 s
p2285 (0.000)
+
+
Tec_reg Vorsteuer
(0)
p2289[C]
1
+
p2263 = 0
x
y
F07426
-1
P, I and D components can be disabled by entering a zero.
Tec_ctrl set1 scal
0.00 ... 100.00 [%]
p2255 (100.00)
Tec_ctrl setp 1
(0)
p2253 [C]
Tec_ctrl setp 2
(0)
p2254 [C]
Tec_ctrl set2 scal
0.00 ... 100.00 [%]
p2256 (100.00)
Tec_ctrl t_ramp-up
0.00 ... 650.00 [s]
p2257 (1.00)
Tec_ctrl t_ramp-dn
0.00 ... 650.00 [s]
p2258 (1.00)
Tec_ctrl set T
0.000 ... 60.000 [s]
p2261 (0.000)
r2260
Tec_ctr set aftRFG [%]
r2262
Tec_ctr set aftFlt [%]
r2273
Tec_ctrl error [%]
Tec_ctrl outp scal
(2295[0])
p2296 [C]
Tec_ctrl m_lm s_sc
(1084[0])
p2297 [C]
Tec_ctrl min_l s_s
(2292[0])
p2298 [C]
Tec_ctr ramp up/dn
0.00 ... 100.00 [s]
p2293 (1.00)
Tec_ctrl status
r2349
r2349
.0
(0)
Tec_ctrl enable
p2200 [C]
Tec_ctrl D comp T
0.000 ... 60.000 [s]
p2274 (0.000)
Tec_ctrl type
0 ... 1
p2263 (0)
Tec_ctrl l_lim act
-200.00 ... 200.00 [%]
p2268 (-100.00)
r2266
Tec_ctr act aftFlt [%]
Tech_ctrl gain act
0.00 ... 500.00 [%]
p2269 (100.00)
Tec_ctrl act T
0.000 ... 60.000 [s]
p2265 (0.000)
Tech_ctrl act_fct
0 ... 3
p2270 (0)
Tec_ctrl outp scal
-100.00 ... 100.00 [%]
p2295 (100.00)
<4>
Tec_ctrl status
r2349
r2349
.10
Tec_ctrl status
r2349
r2349
.11
r0052.2
[2510.6]
Tec_ctr start val
0.00 ... 200.00 [%]
p2302 (0.00)
ZSW cl-loop ctrl
r0056
r0056
.13
<3>
<2>
The start value p2302 is only used in mode p2251 = 0 (Technology controller as
speed main setpoint).
After enable of technology controller the start value is present as long as the RFG
output reaches this value.
<3>
I component stop, only when r2273 and r2294 in same direction.
<4>
By p2251 = 1: p2299 = 0 (default), recommendation: p2299 connected to r1150.
Tec_ctrl u_lim act
-200.00 ... 200.00 [%]
p2267 (100.00)
Tech_ctrl lim offs
(0)
p2299 [C]
(56.13)
Tec_ctr integ stop
p2286 [C]
Tech_ctrl act inv
0 ... 1
p2271 (0)
Tec_ctrl status
r2349
r2349
.12
r2349.8
r2349.9
<5>
r2349.12 = 1, if p2345 > 0 and actual value limited and start value p2302 not active.
Tec_ctrl act val
(0)
p2264 [C]
r2349.1
0
1
Tec_ctrl status
r2349
r2349
.12
Tec_ctr fix val 15
-200.00 ... 200.00 [%]
p2215 [D] (150.00)
10 s
1
2
<2>
Tech_ctrl flt resp
0 ... 2
p2345 (0)
<5>
<5>
r1150
RFG n_set at
outp [1/min]
r2272
Tech_ctrl act
scal [%]
r2294
Tec_ctrl
outp_sig [%]
Tec_ctrl max_limit
-200.00 ... 200.00 [%]
p2291 (100.00)
r1084
n_limit pos eff [1/min]
Tec_ctrl min_lim
-200.00 ... 200.00 [%]
p2292 (0.00)
r1087
n_limit neg eff [1/min]
<6> Signal = 0 --> factor = 0, when setpoint from external OP or operating tool.
<6>
0
1
ESM status word
r3889
r3889
.6
ESM status word
r3889
r3889
.0
0
1
ESM setp tech_ctrl
(0)
p3884
ESM status word
r3889
r3889
.5
[7974.3]
<7>
Change over only if p2251 = 0 (Technology controller as speed main setpoint).
<7>
r2344
Tec_ctrl
n_setp_sm
[%]
<8>
p2251 = 0: I component is stopped, when r2294 is below the minimum speed or within a suppression bandwidth.
<8>
1
0
1
0
-1
Tec_ctrl fault inv
0 ... 1
p2306 (0)
-1
01
p2263 = 1
r2273
Tec_ctrl error [%]