
Operating instructions






MM420 Parameter List 04/02
MICROMASTER 420 Parameter List
118 6SE6400-5BA00-0BP0
- 2510 -
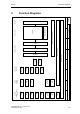
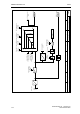
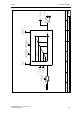
Function diagram
87654321
2510_USSonBOP.vsd
External Interfaces
MICROMASTER 420
08.03.2002 V1.13
USS on BOP link, Transmitting
PKW
PZD
1
2
3
0
ADRBCC
PZD
PKW
03 2 1
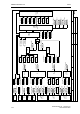
Transmit telegram
[0]
P2016
[2]
[3]
[1]
CO/BO: Act StatWd1
r0052
r0052
r0021
CO: Act. frequency [Hz]
CO/BO: Act StatWd2
r0053
r0053
LGE STX
TxD
Bit00 Drive ready
Bit01 Drive ready to run
Bit02 Drive running
Bit03 Drive fault active
Bit04 OFF2 active
Bit05 OFF3 active
Bit06 ON inhibit active
Bit07 Drive warning active
Bit08 Deviation setpoint / act. value
Bit09 PZD control
Bit10 Maximum frequency reached
Bit11 Warning: Motor current
Bit12 Motor holding brake active
Bit13 Motor overload
Bit14 Motor runs right
Bit15 Inverter overload
Bit00 DC brake active
Bit01 Act. freq. r0021 > P2167 (f_off)
Bit02 Act. freq. r0021 > P1080 (f_min)
Bit03 Act. current r0027 >= P2170
Bit04 Act. freq. r0021 >= P2155 (f_1)
Bit05 Act. freq. r0021 < P2155 (f_1)
Bit06 Act. freq. r0021 >= setpoint
Bit07 Act. Vdc r0026 < P2172
Bit08 Act. Vdc r0026 > P2172
Transmit
Bit09 Ramping finished
Bit10 PID output r2294 == P2292 (PID_min)
Bit11 PID output r2294 == P2291 (PID_max)
Bit14 Download data set 0 from AOP
Bit15 Download data set 1 from AOP
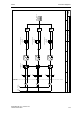
All parameters:
Index = 1
=> BOP link
USS baudrate
3 ... 9
P2010 [2] (6)
USS
configuration
Change par. via
0 ... 15
P0927 (15)
USS address
0 ... 31
P2011 [2] (0)
USS PKW length
0 ... 127
P2013 [2] (127)
USS PZD length
0 ... 4
P2012 [2] (2)
USS telegram T_off
0 ... 65535 [ms]
P2014 [2] (0)
Bit2 = 1
Note:
P2016[0] = 52
P2016[1] = 21
P2016[3] = 53
are default settings