
Operating Instructions






CANopen Overview
CANopen Communication Interface Descriptions
361 | 443
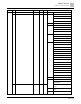
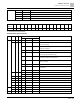
Speed mode
(Index 6060 = 2)
Index 6040
Result
bit 6
bit 5
bit 4
1
0
1
Locked at the current frequency.
1
1
1
Run to reach the target frequency.
Other
Decelerating to 0 Hz.
Fig. 124:
NOTE 1: Read 6043 to get the current rotation speed (unit: rpm)
NOTE 2: Read bit 10 of 6041 to check if the rotation speed has reached the targeting value (0: Not reached; 1:
Reached).
Using the Standard (Old definition, only supports speed mode)
Various mode control method (following the old standard)
If you want to use the old standard to control the motor drive, follow these steps:
Wire the hardware (refer to Section 15-2 Wiring for CANopen).
Set the operation source: set Pr.00-21 to 3 for CANopen communication card control.
Set the frequency source: set Pr.00-20 to 6. Choose the source for the Frequency command from the CANopen
setting.
Set Standard (Old definition, only supports speed mode) as the control mode: Pr.09-40 = 0 and Pr.09-30 = 0.