
Datasheet









ROM Commands
After the bus master has detected a presence pulse, it
can issue a ROM command. These commands operate
on the unique 64-bit ROM codes of each slave device
and allow the master to single out a specific device if
many are present on the 1-Wire bus. These commands
also allow the master to determine how many and what
types of devices are present on the bus or if any device
has experienced an alarm condition. There are five ROM
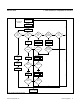
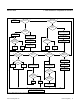
commands, and each command is 8 bits long. The master
device must issue an appropriate ROM command before
issuingaMAX31820Functioncommand.Figure7 shows
a flowchart for operation of the ROM commands.
Search ROM [F0h]
When a system is initially powered up, the master must
identify the ROM codes of all slave devices on the bus,
which allows the master to determine the number of
slaves and their device types. The master learns the ROM
codes through a process of elimination that requires the
mastertoperformaSearchROMcycle(i.e.,SearchROM
command followed by data exchange) as many times as
necessary to identify all the slave devices. If there is only
one slave on the bus, the simpler Read ROM command
canbeusedinplaceoftheSearchROMprocess.Fora
detailedexplanationoftheSearchROMprocedure,refer
to ApplicationNote937:Book of iButton Standards. After
everySearchROMcycle,thebusmastermustreturnto
Step1(initialization)inthetransactionsequence.
Read ROM [33h]
This command can only be used when there is one slave
on the bus. It allows the bus master to read the slave’s
64-bitROMcodewithoutusingtheSearchROMproce-
dure. If this command is used when there is more than
one slave present on the bus, a data collision occurs
when all the slaves attempt to respond at the same time.
Match ROM [55h]
The match ROM command, followed by a 64-bit ROM
code sequence, allows the bus master to address a
specific slave device on a multidrop or single-drop bus.
Only the slave that exactly matches the 64-bit ROM code
sequence responds to the function command issued
by the master; all other slaves on the bus wait for a
reset pulse.
Skip ROM [CCh]
The master can use this command to address all devices
on the bus simultaneously, without sending out any ROM
codeinformation.Forexample,themastercanmakeall
devices on the bus perform simultaneous temperature
conversionsbyissuing a SkipROMcommand followed
by a Convert T [44h] command.
Note that the Read Scratchpad [BEh] command can
followtheSkip ROM commandonlyif thereisa single
slave device on the bus. In this case, time is saved by
allowing the master to read from the slave without send-
ingthedevice’s64-bitROMcode.ASkipROMcommand
followedbyaReadScratchpadcommandcausesadata
collision on the bus if there is more than one slave since
multiple devices attempt to transmit data simultaneously.
Alarm Search [ECh]
The operation of this command is identical to the opera-
tion of the Search ROM command except that only
slaves with a set alarm flag respond. This command
allows the master device to determine if any MAX31820s
experienced an alarm condition during the most recent
temperatureconversion.AftereveryAlarmSearchcycle
(i.e.,AlarmSearchcommandfollowedbydataexchange),
thebusmastermustreturntoStep1(initialization)inthe
transaction sequence. See the Alarm Signaling section
for an explanation of alarm flag operation.
MAX31820 1-Wire Ambient Temperature Sensor
www.maximintegrated.com
Maxim Integrated
│
12