
Operating instructions








Vector Control Chassis Type Frequency Converter Parameterizing steps
SIEMENS AG 476 869 4070 76 J AB-74
SIMOVERT MASTERDRIVES Operating Instructions 9-29
87654321
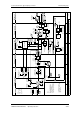
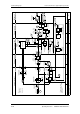
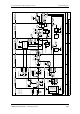
Closed-loop speed control (P100=4)
MASTERDRIVES VCMaster drive (P587 = 0)
- r4 -
Imp.tach.
Ana.tach.
X103
23 Tacho M
24 Track A
25 Track B
26 Zero track
27 Control track
28 Tacho P15V
Normalization
P127.M (80%)
R(rotor)Ktmp
Motor encoder
P130.M (11) *
)
Pulse #
P151.M (1024) *
)
KK148
n/f(ist)
n/f(act)
r218
Smooth.n/f(pre)
P216.M
Smooth n/f(act)
P223.M
P443.B
KK
Src main setpoint
P462.F (10 s)
Accel Time
P464.F (10 s)
Decel Time
n/f(set)
r482
n/f(set,smooth)
r229
P453.F (-110,0%) *
)
n/f(max,neg.spd)
n/f(max,pos.spd)
P452.F (110,0%) *
)
–
P235.M
n/f-Reg.Kp1
K0155
i-Anteil
K0153
Msoll,reg
Scal.Torq(pre.)
P471.M
P438.B (0)
KK
Src Add Setp2
K0165
T(set,limitr)
r269
x
y
Volt.
Mod.
Depth
Asyc.
Mot. 3~
Torque limitation
P240.M
n/f-Reg.Tn
P339.M *
)
ModSystem
Release
Tn
P284.M
Kp
P283.M
K0184
Isq(act)
Kp
P283.M
Tn
P284.M
Isd (act)
–
–
max.outp.volt.
r346
ModDepth Headrm
P344.M
Field weakening
characteristic
K0168
Isq(set)
+
KK188
Slip frequency
Current
model
EMF
Model
KK199
f(set,Stator)
–
P315.M
EMF Reg Gain
P316.M
EMF Reg.Tn
Smooth Vd(act)
P287.M
Setpoint channel Speed controller Torque/current limit Current controller Gating unit
Sheet 350Sheet250
Sheet 316 Sheet 317 Sheet 319 Sheet 360 Sheet 365 Sheet 370 Sheet 390
Sheet 380
Blatt 395
Sheet 285
Motor
encoder
P138.M (3000)
Ana.TachoComp
KK075
r014
Setpoint speed
+
Sheet 318
K0172
TorqLimit1,act
K0173
TorqLimit2,act
P433.B (0)
KK
Src Add Setp.1
P499.B (171)
K
Src TorqLimit2
K171
P493.B (170)
K
Src TorqLimit1
TorqLimit1 FSetp
P492.F (100%)
K170
TorqLimit2 FSetp
P498.F (-100%)
*
)
Parameter can only be changed in the "Drive setting" status
P60=5
KK091
n/f(act,encoder)
Start-up time
P116.M
Maximum current
P128.M
Pw,max(gen)
P259.M
r129
Ref.
frequency: P352 * )
speed: P353 * )
torque: P354 * )
P354 is referred to
P113 *)
N
3
6
2