
Data Sheet










Table Of Contents
AlphaBot User Manual
12
share awesome hardware
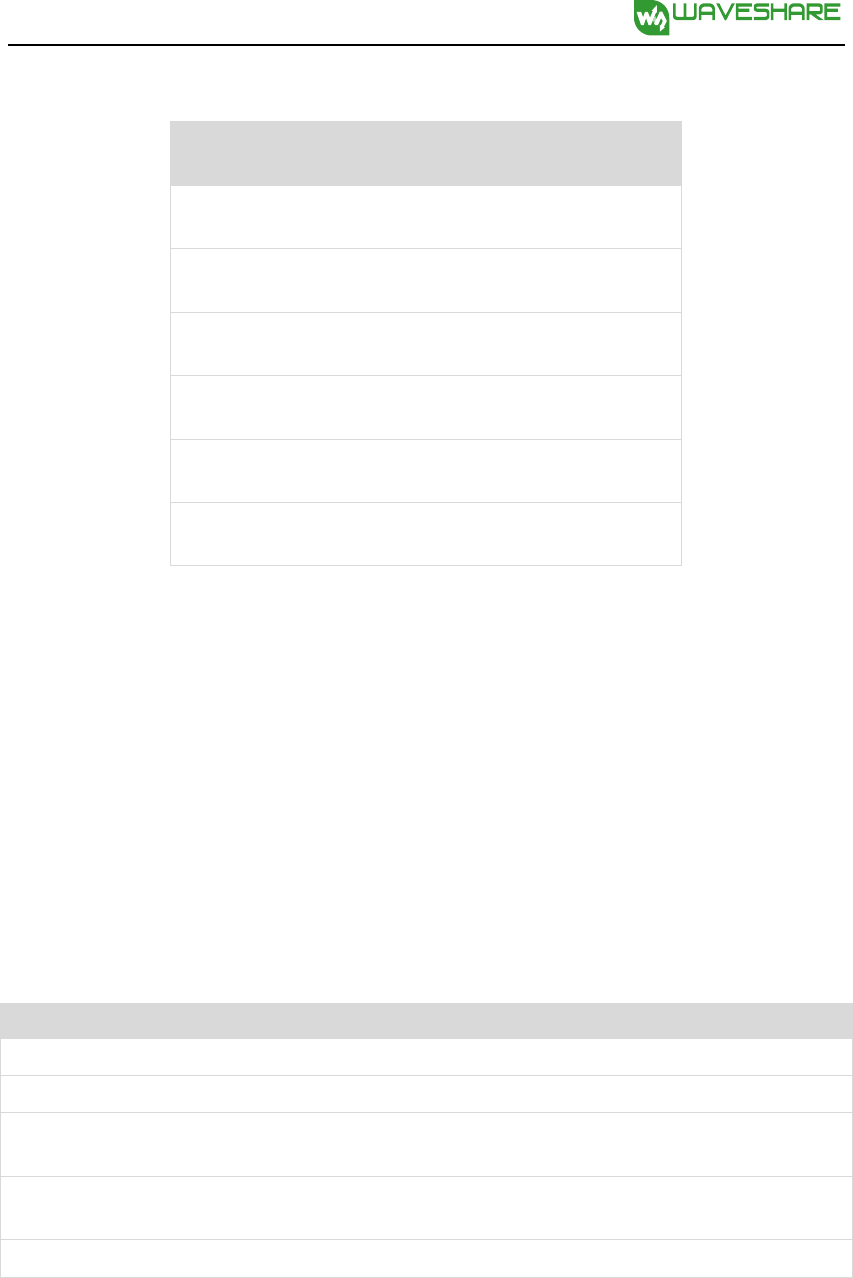
Interface definition of driver module:
Interfaces
Raspberry Pi
Arudino
IN1
P12
A0
IN2
P13
A1
ENA
P6
D5
IN3
P20
A2
IN4
P21
A3
ENB
P26
D6
IN1 and IN2 are connected to the left motor, while IN3 and IN4 are connected to
the right motor.
ENA and ENB are output enable pins, active high enable. When they are driven to
High level, the PWM pulse will be outputted from IN1, IN2, IN3 and IN4, so as to
control the speed of the motor robot.
Control theory:
IN1
IN2
IN3
IN4
Descriptions
1
0
0
1
When the motors rotate forwards, the robot goes straight
0
1
1
0
When the motors rotate backwards, the robot draws back
0
0
0
1
When the left motor stops and right motor rotates forwards,
the robot turns left
1
0
0
0
When the right motor stops and left motor rotates forwards,
the robot turns right
0
0
0
0
When the motors stop, the robot stops